
 Tutorials Tutorials | (back to the list of tutorials) |
 Particle Based Agent
Particle Based Agent![]()
![]()
![]()
![]()
import igeo.*;
import processing.opengl.*;
void setup(){
size(480,360,IG.GL);
new MyParticle(new IVec(0,0,0), new IVec(10,0,0));
}
class MyParticle extends IParticle{
MyParticle(IVec p, IVec v){
super(p, v); // initialize with position and velocity
}
}
The code above shows just one moving particle. If you want to show a trajectory of a particle, you can use IParticleTrajectory instead of IParticle.
![]()
![]()
![]()
![]()
import igeo.*;
import processing.opengl.*;
void setup(){
size(480,360,IG.GL);
new MyParticle(new IVec(0,0,0), new IVec(10,0,0));
}
class MyParticle extends IParticleTrajectory{
MyParticle(IVec p, IVec v){
super(p, v);
}
}

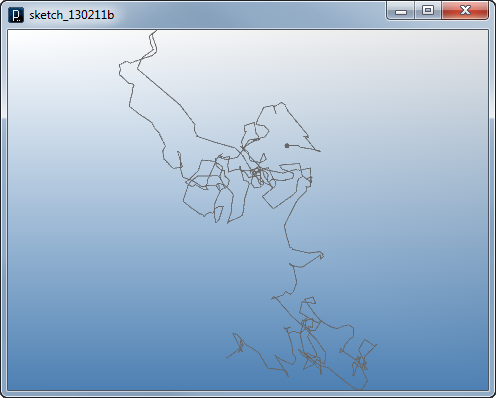
Random Walk Rule in Update Method![]()
![]()
![]()
![]()
import igeo.*;
import processing.opengl.*;
void setup(){
size(480,360,IG.GL);
new MyParticle(new IVec(0,0,0), new IVec(10,0,0));
}
class MyParticle extends IParticleTrajectory{
MyParticle (IVec p, IVec v) {
super(p, v);
fric(0.05); // 5% friction
}
void update(){
if (IRand.pct(10)) {
push(IRand.pt(-1000, -1000, 0, 1000, 1000, 0));
}
}
}
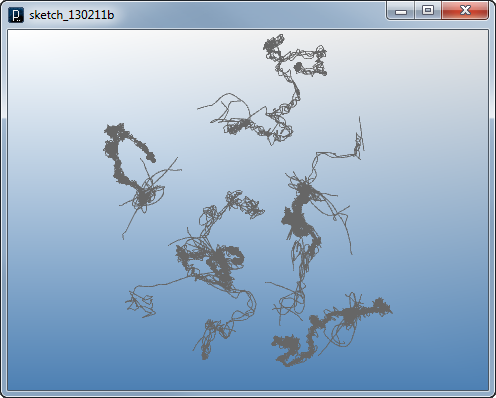
Attraction Force Rule in Interact Method![]()
![]()
![]()
![]()
import igeo.*;
import processing.opengl.*;
void setup(){
size(480,360,IG.GL);
for(int i=0; i < 50; i++){
new MyParticle(IRand.pt(-50,-50,0,50,50,0), new IVec(0,0,0));
}
}
class MyParticle extends IParticleTrajectory{
MyParticle(IVec p, IVec v){
super(p, v);
fric(0.05); // 5% friction
}
void interact(ArrayList < IDynamics > agents){
for(int i=0; i < agents.size(); i++){
if(agents.get(i) instanceof MyParticle){
MyParticle ptcl = (MyParticle)agents.get(i);
if(ptcl != this){
if(ptcl.pos().dist(pos()) < 15){ // closer than 15
IVec dif = pos().dif(ptcl.pos()); //other to this
dif.len(40); // intensity of force
ptcl.push(dif);
}
}
}
}
}
void update(){
if (IRand.pct(10)) {
push(IRand.pt(-500, -500, 0, 500, 500, 0));
}
}
}
Adding A State Property![]()
![]()
![]()
![]()
import igeo.*;
import processing.opengl.*;
void setup(){
size(480,360,IG.GL);
for(int i=0; i < 100; i++){
new MyParticle(IRand.pt(-50,-50,0,50,50,0), new IVec(0,0,0));
}
}
class MyParticle extends IParticleTrajectory{
int state = 0; // initial state
MyParticle(IVec p, IVec v){
super(p, v);
fric(0.05); // 5% friction
}
void interact(ArrayList < IDynamics > agents){
for(int i=0; i < agents.size(); i++){
if(agents.get(i) instanceof MyParticle){
MyParticle ptcl = (MyParticle)agents.get(i);
if(ptcl != this){
if(ptcl.pos().dist(pos()) < 15){ // closer than 15
IVec dif = pos().dif(ptcl.pos()); //other to this
dif.len(40); // intensity of force
if(state==1){ // attraction
ptcl.push(dif);
}
else if(state==2){ // repulsion
ptcl.pull(dif);
}
}
}
}
}
}
void update(){
if (IRand.pct(10)) {
push(IRand.pt(-500, -500, 0, 500, 500, 0));
}
if(IRand.pct(1)){ // switch state
if(state==0){ // state 0 -> 1
state = 1; // attraction
clr(1.0,0,1.0);
}
else if(state==1){ // state 1 -> 2
state = 2; // repulsion
clr(0,0,1.0);
}
else{ // state 2 -> 0
state = 0; // random walk only
clr(0.5);
}
}
}
}

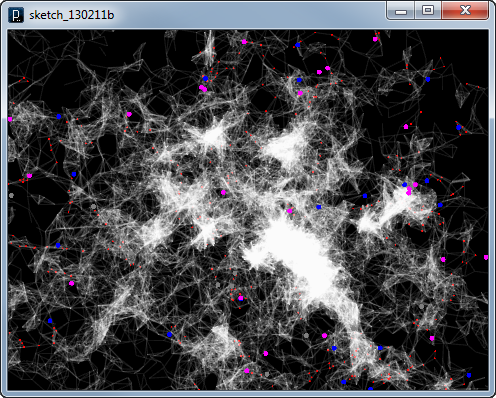
Other Agent Classes to Interact![]()
![]()
![]()
![]()
import igeo.*;
import processing.opengl.*;
void setup(){
size(480,360,IG.GL);
for(int i=0; i < 100; i++){
new MyParticle(IRand.pt(-50,-50,0,50,50,0), new IVec(0,0,0));
}
IG.bg(0);
}
class MyParticle extends IParticle{
int state = 0; // initial state
MyParticle(IVec p, IVec v){
super(p, v);
fric(0.05); // 5% friction
}
void interact(ArrayList < IDynamics > agents){
for(int i=0; i < agents.size(); i++){
if(agents.get(i) instanceof MyParticle){
MyParticle ptcl = (MyParticle)agents.get(i);
if(ptcl != this){
if(ptcl.pos().dist(pos()) < 15){ // closer than 15
IVec dif = pos().dif(ptcl.pos()); //other to this
dif.len(20); // intensity of force
if(state==1){ // attraction
ptcl.push(dif);
}
else if(state==2){ // repulsion
ptcl.pull(dif);
}
}
}
}
}
}
void update(){
if (IRand.pct(10)) {
push(IRand.pt(-500, -500, 0, 500, 500, 0));
}
if(IRand.pct(1)){ // switch state
if(state==0){ // state 0 -> 1
state = 1; // attraction
clr(1.0,0,1.0);
}
else if(state==1){ // state 1 -> 2
state = 2; // repulsion
clr(0,0,1.0);
}
else{ // state 2 -> 0
state = 0; // random walk only
clr(0.5);
}
}
if(time()%20 == 0){
new Anchor(pos().cp());
}
}
}
class Anchor extends IAgent{
IVec pos;
IPoint point;
Anchor(IVec p){
pos = p;
point = new IPoint(pos).clr(1.0,0,0).size(2);
}
void interact(ArrayList < IDynamics > agents){
if(time()==0){ // only when the first time
for(int i=0; i < agents.size(); i++){
if(agents.get(i) instanceof Anchor){
Anchor a = (Anchor)agents.get(i);
if(a!=this && a.time() > 0){ // exclude anchors just created
if(a.pos.dist(pos) < 10){ // closer than 10
new ICurve(a.pos, pos).clr(1.0,0.1);
}
}
}
}
}
}
void update(){
if(time()==100){ // delete after 100 time frame
point.del();
del();
}
}
}

HOME
FOR PROCESSING
DOWNLOAD
DOCUMENTS
TUTORIALS (Java /
Python)
GALLERY
SOURCE CODE(GitHub)
PRIVACY POLICY
ABOUT/CONTACT
