
 Python Tutorials Python Tutorials | (back to the list of tutorials) |
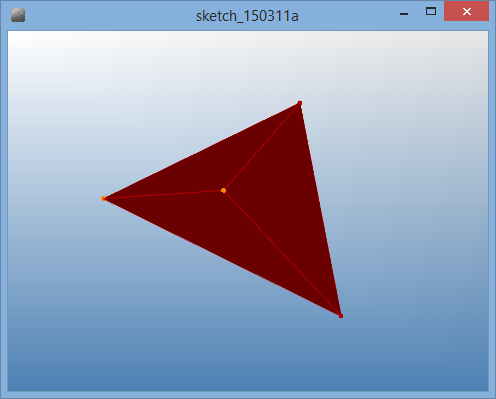
 Triangular Link for Surface Formation and Peripheral Edge Division
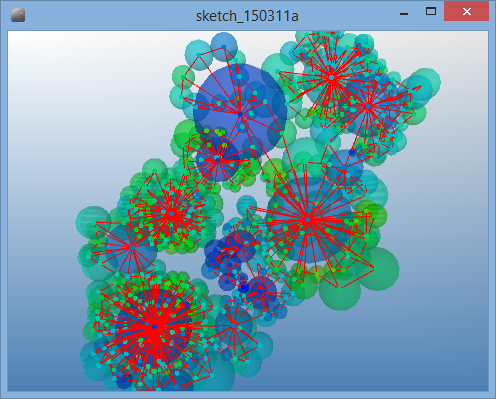
Triangular Link for Surface Formation and Peripheral Edge DivisionThe first code in this page adds a new class CellFace which contains references to three cells and three links. Cell class also stores what CellFace instances contain the cell in the variable array field faces. CellLink also stores what CellFace instances contain the cell link in faces field.
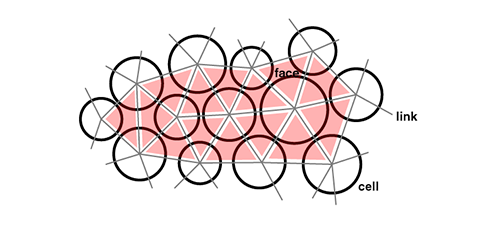
The code below adds an algorithm to divide a face in Cell class's divide method. Conceptually the division of a face is done by dividing one of edge of the face triangle and insert a cell there and divide the original triangle into two with a new link in the middle as depicted in the diagram below. In the code, it's done by deleting the edge link to divide and the original face, and then add three new links and two new faces. When a cell contains only one link (only one line connecting two cells), it creates two links and one face with the new child cell to have a first face to be divided later.

![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480,360,IG.GL)
IConfig.syncDrawAndDynamics=True #not to crash when some geometry is deleted while drawing
cell = Cell(IVec(0,0,0), 10)
class Cell(IParticle) :
growthDuration = 1400 #duration of growth and division
growthInterval = 10
divisionInterval = 50
maxRadius = 100
growthSpeed=0.1
def __init__(self, pos, rad) :
IParticle.__init__(self, pos, IVec(0,0,0))
self.radius = rad
self.links = [] #store links
self.faces = [] #store faces
self.active = False
self.fric(0.2)
def interact(self, agents) :
neighborCenter = IVec(0,0,0)
neighborCount=0
neighborDist = self.radius*4
for a in agents :
if isinstance(a, Cell) :
if a is not self :
# push if closer than two radii
if a.pos().dist(self.pos()) < a.radius+self.radius :
dif = a.pos().dif(self.pos())
dif.len(((a.radius+self.radius)-dif.len())*100+50) # the closer the harder to push
a.push(dif)
# count neighbors and calculate their center
if a.pos().dist(self.pos()) < a.radius+self.radius + neighborDist :
neighborCenter.add(a.pos())
neighborCount+=1
if neighborCount >= 1 : # push from center of neighbors
neighborCenter.div(neighborCount)
dif = self.pos().dif(neighborCenter).len(50) # constant force
self.push(dif)
def update(self) :
if IG.time() < Cell.growthDuration :
if self.time() > 0 and self.time()%Cell.divisionInterval==0 :
if self.active : # divide when active flag is on
self.divide()
if IRand.pct(50) : # random division
self.active = True
if self.time()%Cell.growthInterval==0 :
self.grow()
if self.active : # update color by being active
self.clr(1.0,0.5,0)
else :
self.clr(1.0,0,0)
def grow(self) : # growing cell size
if self.radius < Cell.maxRadius :
self.radius += Cell.growthSpeed
def divide(self) : # cell division
if len(self.links)==0 : # dot state
child = self.createChild(IRand.dir())
CellLink(self, child) # add one link
elif len(self.links)==1 : # line state
child = self.createChild(IRand.dir()) # making a triangle loop
CellLink(child, self.links[0].cell1)
CellLink(child, self.links[0].cell2)
CellFace(child, self.links[0].cell1, self.links[0].cell2) # making a triangle face
else : # strip state
# divide one link
dividingLink = self.links[IRand.getInt(0,len(self.links)-1)]
if len(dividingLink.faces)==2 :
self.active = False
return # if link has two faces, skip division
dir = dividingLink.oppositeDir(self) # vector to the other cell
child = self.createChild(dir) # make a child toward the link direction
c0 = dividingLink.oppositeCell(self) # opposite cell on the link
f1 = dividingLink.faces[0] # existing face on the link
c1 = f1.oppositeCell(dividingLink) # opposite cell from the link on the face
# delete 1 link + 1 face, create 3 links + 2 faces
CellLink(self, child)
CellLink(c1,child)
CellLink(c0,child)
CellFace(self, c1, child)
CellFace(child, c1, c0)
dividingLink.delete()
f1.delete()
def createChild(self, dir) :
self.radius *= 0.5 #make both cell size half
dir.len(self.radius)
child = Cell(self.pos().cp(dir), self.radius)
self.pos().sub(dir) # move to the other way
self.active = False #reset activation
return child
class CellLink(IAgent) : # a link to connect 2 cells with spring force
maxForce = 100
def __init__(self, c1, c2) :
IAgent.__init__(self)
self.cell1 = c1
self.cell2 = c2
self.cell1.links.append(self) # register this link to cells{
self.cell2.links.append(self)
self.faces = []
self.line = ICurve(c1.pos(), c2.pos()).clr(1.0,0,0)
def interact(self, agents) :
# spring force
dif = self.cell1.pos().dif(self.cell2.pos())
force = (dif.len()-(self.cell1.radius+self.cell2.radius))/(self.cell1.radius+self.cell2.radius)*300
if force > CellLink.maxForce : # if putting too much force
force = CellLink.maxForce
elif force < -CellLink.maxForce :
force = -CellLink.maxForce
dif.len(force)
self.cell1.pull(dif)
self.cell2.push(dif)
def contains(self, c) : #check if link contains the cell
if c is self.cell1 or c is self.cell2 :
return True
return False
def delete(self) :
self.cell1.links.remove(self) # unregister from cells
self.cell2.links.remove(self)
self.line.del() # delete line geometry
self.del() # stop agent
def oppositeCell(self, c) : # find other cell on the link
if self.cell1 is c :
return self.cell2
if self.cell2 is c :
return self.cell1
print("Link does not contain the input cell")
return None
def oppositeDir(self, c) : #calculate a vector to the other cell
return self.oppositeCell(c).pos().dif(c.pos())
class CellFace : # a triangle grouping 3 cells and 3 links
def __init__(self, c1, c2, c3) :
self.cell1 = c1
self.cell2 = c2
self.cell3 = c3
self.link1 = self.findLink(self.cell1, self.cell2)
self.link2 = self.findLink(self.cell2, self.cell3)
self.link3 = self.findLink(self.cell3, self.cell1)
self.cell1.faces.append(self) # register this face to cells and links
self.cell2.faces.append(self)
self.cell3.faces.append(self)
self.link1.faces.append(self)
self.link2.faces.append(self)
self.link3.faces.append(self)
def center(self) : # calc center of triangle
return IVec.center(self.cell1.pos(), self.cell2.pos(), self.cell3.pos())
def contains(self, link) : # check if the link is contained
return self.link1 is link or self.link2 is link or self.link3 is link
def findLink(self, c1, c2) : # find a link between 2 cells
for l in c1.links :
if l.contains(c2) :
return l
print("link not found")
return None
def oppositeCell(self, l) : # find a cell opposite of a link edge in a triangle
if self.cell1 is not l.cell1 and self.cell1 is not l.cell2 :
return self.cell1
if self.cell2 is not l.cell1 and self.cell2 is not l.cell2 :
return self.cell2
return self.cell3
def delete(self) :
self.cell1.faces.remove(self) # unregister self from cells and links
self.cell2.faces.remove(self)
self.cell3.faces.remove(self)
self.link1.faces.remove(self)
self.link2.faces.remove(self)
self.link3.faces.remove(self)
Visualization of Cell with Spherical Body
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480,360,IG.GL)
IConfig.syncDrawAndDynamics=True #not to crash when some geometry is deleted while drawing
cell = Cell(IVec(0,0,0), 10)
cell.clr(0,0,1.0)
class Cell(IParticle) :
growthDuration = 1400 #duration of growth and division
growthInterval = 10
divisionInterval = 50
maxRadius = 100
growthSpeed=0.1
def __init__(self, pos, rad) :
IParticle.__init__(self, pos, IVec(0,0,0))
self.radius = rad
self.links = [] #store links
self.faces = [] #store faces
self.active = False
self.sphere = None
self.fric(0.2)
def interact(self, agents) :
neighborCenter = IVec(0,0,0)
neighborCount=0
neighborDist = self.radius*4
for a in agents :
if isinstance(a, Cell) :
if a is not self :
# push if closer than two radii
if a.pos().dist(self.pos()) < a.radius+self.radius :
dif = a.pos().dif(self.pos())
dif.len(((a.radius+self.radius)-dif.len())*100+50) # the closer the harder to push
a.push(dif)
# count neighbors and calculate their center
if a.pos().dist(self.pos()) < a.radius+self.radius + neighborDist :
neighborCenter.add(a.pos())
neighborCount+=1
if neighborCount >= 1 : # push from center of neighbors
neighborCenter.div(neighborCount)
dif = self.pos().dif(neighborCenter).len(50) # constant force
self.push(dif)
def update(self) :
if IG.time() < Cell.growthDuration :
if self.time() > 0 and self.time()%Cell.divisionInterval==0 :
if self.active : # divide when active flag is on
self.divide()
if IRand.pct(50) : # random division
self.active = True
if self.time()%Cell.growthInterval==0 :
self.grow()
# update geometry
if self.sphere is not None :
self.sphere.del()
self.sphere = IG.meshSphere(self.pos(), self.radius, 16).clr(self)
def grow(self) : # growing cell size
if self.radius < Cell.maxRadius :
self.radius += Cell.growthSpeed
def divide(self) : # cell division
if len(self.links)==0 : # dot state
child = self.createChild(IRand.dir())
CellLink(self, child) # add one link
elif len(self.links)==1 : # line state
child = self.createChild(IRand.dir()) # making a triangle loop
CellLink(child, self.links[0].cell1)
CellLink(child, self.links[0].cell2)
CellFace(child, self.links[0].cell1, self.links[0].cell2) # making a triangle face
else : # strip state
# divide one link
dividingLink = self.links[IRand.getInt(0,len(self.links)-1)]
if len(dividingLink.faces)==2 :
self.active = False
return # if link has two faces, skip division
dir = dividingLink.oppositeDir(self) # vector to the other cell
child = self.createChild(dir) # make a child toward the link direction
c0 = dividingLink.oppositeCell(self) # opposite cell on the link
f1 = dividingLink.faces[0] # existing face on the link
c1 = f1.oppositeCell(dividingLink) # opposite cell from the link on the face
# delete 1 link + 1 face, create 3 links + 2 faces
CellLink(self, child)
CellLink(c1,child)
CellLink(c0,child)
CellFace(self, c1, child)
CellFace(child, c1, c0)
dividingLink.delete()
f1.delete()
def createChild(self, dir) :
self.radius *= 0.5 #make both cell size half
dir.len(self.radius)
child = Cell(self.pos().cp(dir), self.radius)
child.hsb(self.hue()-0.05,1,0.8)
self.pos().sub(dir) # move to the other way
self.active = False #reset activation
return child
class CellLink(IAgent) : # a link to connect 2 cells with spring force
maxForce = 100
def __init__(self, c1, c2) :
IAgent.__init__(self)
self.cell1 = c1
self.cell2 = c2
self.cell1.links.append(self) # register this link to cells{
self.cell2.links.append(self)
self.faces = []
self.line = ICurve(c1.pos(), c2.pos()).clr(1.0,0,0)
def interact(self, agents) :
# spring force
dif = self.cell1.pos().dif(self.cell2.pos())
force = (dif.len()-(self.cell1.radius+self.cell2.radius))/(self.cell1.radius+self.cell2.radius)*300
if force > CellLink.maxForce : # if putting too much force
force = CellLink.maxForce
elif force < -CellLink.maxForce :
force = -CellLink.maxForce
dif.len(force)
self.cell1.pull(dif)
self.cell2.push(dif)
def contains(self, c) : #check if link contains the cell
if c is self.cell1 or c is self.cell2 :
return True
return False
def delete(self) :
self.cell1.links.remove(self) # unregister from cells
self.cell2.links.remove(self)
self.line.del() # delete line geometry
self.del() # stop agent
def oppositeCell(self, c) : # find other cell on the link
if self.cell1 is c :
return self.cell2
if self.cell2 is c :
return self.cell1
print("Link does not contain the input cell")
return None
def oppositeDir(self, c) : #calculate a vector to the other cell
return self.oppositeCell(c).pos().dif(c.pos())
class CellFace : # a triangle grouping 3 cells and 3 links
def __init__(self, c1, c2, c3) :
self.cell1 = c1
self.cell2 = c2
self.cell3 = c3
self.link1 = self.findLink(self.cell1, self.cell2)
self.link2 = self.findLink(self.cell2, self.cell3)
self.link3 = self.findLink(self.cell3, self.cell1)
self.cell1.faces.append(self) # register this face to cells and links
self.cell2.faces.append(self)
self.cell3.faces.append(self)
self.link1.faces.append(self)
self.link2.faces.append(self)
self.link3.faces.append(self)
def center(self) : # calc center of triangle
return IVec.center(self.cell1.pos(), self.cell2.pos(), self.cell3.pos())
def contains(self, link) : # check if the link is contained
return self.link1 is link or self.link2 is link or self.link3 is link
def findLink(self, c1, c2) : # find a link between 2 cells
for l in c1.links :
if l.contains(c2) :
return l
print("link not found")
return None
def oppositeCell(self, l) : # find a cell opposite of a link edge in a triangle
if self.cell1 is not l.cell1 and self.cell1 is not l.cell2 :
return self.cell1
if self.cell2 is not l.cell1 and self.cell2 is not l.cell2 :
return self.cell2
return self.cell3
def delete(self) :
self.cell1.faces.remove(self) # unregister self from cells and links
self.cell2.faces.remove(self)
self.cell3.faces.remove(self)
self.link1.faces.remove(self)
self.link2.faces.remove(self)
self.link3.faces.remove(self)
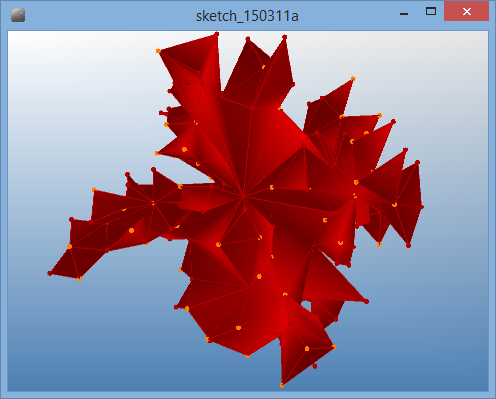
Building Polygon Mesh by Cells and Links
![]()
![]()
![]()
add_library('igeo')
mesh = None # global variable of mesh geometry
def setup() :
size(480,360,IG.GL)
IConfig.syncDrawAndDynamics=True #not to crash when some geometry is deleted while drawing
mesh = IMesh().clr(0.7,0,0)
cell = Cell(IVec(0,0,0), 10)
class Cell(IParticle) :
growthDuration = 1400 #duration of growth and division
growthInterval = 10
divisionInterval = 50
maxRadius = 100
growthSpeed=0.1
def __init__(self, pos, rad) :
IParticle.__init__(self, pos, IVec(0,0,0))
self.radius = rad
self.links = [] #store links
self.faces = [] #store faces
self.active = False
self.vertex = IVertex(self.pos())
self.fric(0.2)
def interact(self, agents) :
neighborCenter = IVec(0,0,0)
neighborCount=0
neighborDist = self.radius*4
for a in agents :
if isinstance(a, Cell) :
if a is not self :
# push if closer than two radii
if a.pos().dist(self.pos()) < a.radius+self.radius :
dif = a.pos().dif(self.pos())
dif.len(((a.radius+self.radius)-dif.len())*100+50) # the closer the harder to push
a.push(dif)
# count neighbors and calculate their center
if a.pos().dist(self.pos()) < a.radius+self.radius + neighborDist :
neighborCenter.add(a.pos())
neighborCount+=1
if neighborCount >= 1 : # push from center of neighbors
neighborCenter.div(neighborCount)
dif = self.pos().dif(neighborCenter).len(50) # constant force
self.push(dif)
def update(self) :
if IG.time() < Cell.growthDuration :
if self.time() > 0 and self.time()%Cell.divisionInterval==0 :
if self.active : # divide when active flag is on
self.divide()
if IRand.pct(50) : # random division
self.active = True
if self.time()%Cell.growthInterval==0 :
self.grow()
if self.active : # update color by being active
self.clr(1.0,0.5,0)
else :
self.clr(mesh.clr())
self.vertex.pos().set(self.pos()) # update mesh vertex position
self.vertex.nml(self.nml()) # update mesh vertex normal
def grow(self) : # growing cell size
if self.radius < Cell.maxRadius :
self.radius += Cell.growthSpeed
def divide(self) : # cell division
if len(self.links)==0 : # dot state
child = self.createChild(IRand.dir())
CellLink(self, child) # add one link
elif len(self.links)==1 : # line state
child = self.createChild(IRand.dir()) # making a triangle loop
CellLink(child, self.links[0].cell1)
CellLink(child, self.links[0].cell2)
CellFace(child, self.links[0].cell1, self.links[0].cell2) # making a triangle face
else : # strip state
# divide one link
dividingLink = self.links[IRand.getInt(0,len(self.links)-1)]
if len(dividingLink.faces)==2 :
self.active = False
return # if link has two faces, skip division
dir = dividingLink.oppositeDir(self) # vector to the other cell
dir.projectToPlane(self.nml()) # division dir is projected on normal plane
child = self.createChild(dir) # make a child toward the link direction
c0 = dividingLink.oppositeCell(self) # opposite cell on the link
f1 = dividingLink.faces[0] # existing face on the link
c1 = f1.oppositeCell(dividingLink) # opposite cell from the link on the face
# delete 1 link + 1 face, create 3 links + 2 faces
CellLink(self, child)
CellLink(c1,child)
CellLink(c0,child)
CellFace(self, c1, child)
CellFace(child, c1, c0)
dividingLink.delete()
f1.delete()
def nml(self) : # calc vertex normal from face normal
if len(self.faces)==0 :
return IVec(0,0,1)
n = IVec(0,0,0)
for f in self.faces :
n.add(f.nml())
return n.unit()
def createChild(self, dir) :
self.radius *= 0.5 #make both cell size half
dir.len(self.radius)
child = Cell(self.pos().cp(dir), self.radius)
self.pos().sub(dir) # move to the other way
self.active = False #reset activation
return child
class CellLink(IAgent) : # a link to connect 2 cells with spring force
maxForce = 100
def __init__(self, c1, c2) :
IAgent.__init__(self)
self.cell1 = c1
self.cell2 = c2
self.cell1.links.append(self) # register this link to cells{
self.cell2.links.append(self)
self.faces = []
def interact(self, agents) :
# spring force
dif = self.cell1.pos().dif(self.cell2.pos())
force = (dif.len()-(self.cell1.radius+self.cell2.radius))/(self.cell1.radius+self.cell2.radius)*300
if force > CellLink.maxForce : # if putting too much force
force = CellLink.maxForce
elif force < -CellLink.maxForce :
force = -CellLink.maxForce
dif.len(force)
self.cell1.pull(dif)
self.cell2.push(dif)
def contains(self, c) : #check if link contains the cell
if c is self.cell1 or c is self.cell2 :
return True
return False
def delete(self) :
self.cell1.links.remove(self) # unregister from cells
self.cell2.links.remove(self)
self.del() # stop agent
def oppositeCell(self, c) : # find other cell on the link
if self.cell1 is c :
return self.cell2
if self.cell2 is c :
return self.cell1
print("Link does not contain the input cell")
return None
def oppositeDir(self, c) : #calculate a vector to the other cell
return self.oppositeCell(c).pos().dif(c.pos())
class CellFace : # a triangle grouping 3 cells and 3 links
def __init__(self, c1, c2, c3) :
self.link1 = self.findLink(c1, c2)
# keep order of cells in right hand screw for consistent normal
if len(self.link1.faces)==1 and self.link1.faces[0].cellOrder(c1,c2) :
self.cell1 = c2
self.cell2 = c1
self.cell3 = c3
else :
self.cell1 = c1
self.cell2 = c2
self.cell3 = c3
self.link1 = self.findLink(self.cell1, self.cell2)
self.link2 = self.findLink(self.cell2, self.cell3)
self.link3 = self.findLink(self.cell3, self.cell1)
self.cell1.faces.append(self) # register this face to cells and links
self.cell2.faces.append(self)
self.cell3.faces.append(self)
self.link1.faces.append(self)
self.link2.faces.append(self)
self.link3.faces.append(self)
self.face = IFace(self.cell1.vertex,self.cell2.vertex,self.cell3.vertex)
mesh.addFace(self.face) # add triangular face to the mesh
def center(self) : # calc center of triangle
return IVec.center(self.cell1.pos(), self.cell2.pos(), self.cell3.pos())
def nml(self) : # normal vector
return self.cell1.pos().nml(self.cell2.pos(), self.cell3.pos()).unit()
# True if ordr of c1-c2 follows the order of cell1-cell2-cell3, otherwise False
def cellOrder(self, c1, c2) :
if ( self.cell1 is c1 and self.cell2 is c2 or
self.cell2 is c1 and self.cell3 is c2 or
self.cell3 is c1 and self.cell1 is c2 ) :
return True
return False
def contains(self, link) : # check if the link is contained
return self.link1 is link or self.link2 is link or self.link3 is link
def findLink(self, c1, c2) : # find a link between 2 cells
for l in c1.links :
if l.contains(c2) :
return l
print("link not found")
return None
def oppositeCell(self, l) : # find a cell opposite of a link edge in a triangle
if self.cell1 is not l.cell1 and self.cell1 is not l.cell2 :
return self.cell1
if self.cell2 is not l.cell1 and self.cell2 is not l.cell2 :
return self.cell2
return self.cell3
def delete(self) :
self.cell1.faces.remove(self) # unregister self from cells and links
self.cell2.faces.remove(self)
self.cell3.faces.remove(self)
self.link1.faces.remove(self)
self.link2.faces.remove(self)
self.link3.faces.remove(self)
mesh.deleteFace(self.face)
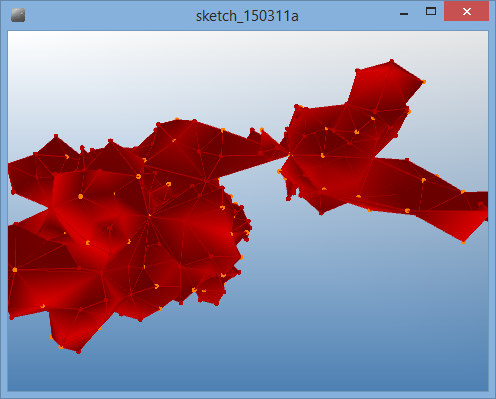
Interior Edge Division on Open Surface

![]()
![]()
![]()
add_library('igeo')
mesh = None # global variable of mesh geometry
def setup() :
size(480,360,IG.GL)
IConfig.syncDrawAndDynamics=True #not to crash when some geometry is deleted while drawing
mesh = IMesh().clr(0.7,0,0)
cell = Cell(IVec(0,0,0), 10)
class Cell(IParticle) :
growthDuration = 1000 #duration of growth and division
growthInterval = 10
divisionInterval = 50
maxRadius = 100
growthSpeed=0.1
def __init__(self, pos, rad) :
IParticle.__init__(self, pos, IVec(0,0,0))
self.radius = rad
self.links = [] #store links
self.faces = [] #store faces
self.active = False
self.vertex = IVertex(self.pos())
self.fric(0.2)
def interact(self, agents) :
neighborCenter = IVec(0,0,0)
neighborCount=0
neighborDist = self.radius*4
for a in agents :
if isinstance(a, Cell) :
if a is not self :
# push if closer than two radii
if a.pos().dist(self.pos()) < a.radius+self.radius :
dif = a.pos().dif(self.pos())
dif.len(((a.radius+self.radius)-dif.len())*100+50) # the closer the harder to push
a.push(dif)
# count neighbors and calculate their center
if a.pos().dist(self.pos()) < a.radius+self.radius + neighborDist :
neighborCenter.add(a.pos())
neighborCount+=1
if neighborCount >= 1 : # push from center of neighbors
neighborCenter.div(neighborCount)
dif = self.pos().dif(neighborCenter).len(50) # constant force
self.push(dif)
def update(self) :
if IG.time() < Cell.growthDuration :
if self.time() > 0 and self.time()%Cell.divisionInterval==0 :
if self.active : # divide when active flag is on
self.divide()
if IRand.pct(50) : # random division
self.active = True
if self.time()%Cell.growthInterval==0 :
self.grow()
if self.active : # update color by being active
self.clr(1.0,0.5,0)
else :
self.clr(mesh.clr())
self.vertex.pos().set(self.pos()) # update mesh vertex position
self.vertex.nml(self.nml()) # update mesh vertex normal
def grow(self) : # growing cell size
if self.radius < Cell.maxRadius :
self.radius += Cell.growthSpeed
def divide(self) : # cell division
if len(self.links)==0 : # dot state
child = self.createChild(IRand.dir())
CellLink(self, child) # add one link
elif len(self.links)==1 : # line state
child = self.createChild(IRand.dir()) # making a triangle loop
CellLink(child, self.links[0].cell1)
CellLink(child, self.links[0].cell2)
CellFace(child, self.links[0].cell1, self.links[0].cell2) # making a triangle face
else : # strip state
# divide one link
dividingLink = self.links[IRand.getInt(0,len(self.links)-1)]
dir = dividingLink.oppositeDir(self) # vector to the other cell
dir.projectToPlane(self.nml()) # division dir is projected on normal plane
child = self.createChild(dir) # make a child toward the link direction
c0 = dividingLink.oppositeCell(self) # opposite cell on the link
if len(dividingLink.faces)==1 :
f1 = dividingLink.faces[0] # existing face on the link
c1 = f1.oppositeCell(dividingLink) # opposite cell from the link on the face
# delete 1 link + 1 face, create 3 links + 2 faces
CellLink(self, child)
CellLink(c1,child)
CellLink(c0,child)
CellFace(self, c1, child)
CellFace(child, c1, c0)
dividingLink.delete()
f1.delete()
elif len(dividingLink.faces)==2 :
f1 = dividingLink.faces[0]
f2 = dividingLink.faces[1]
c1 = f1.oppositeCell(dividingLink)
c2 = f2.oppositeCell(dividingLink)
# delete 1 link + 1 face, create 4 links + 4 faces
CellLink(self, child)
CellLink(c1,child)
CellLink(c2,child)
CellLink(c0,child)
CellFace(self, c1, child)
CellFace(self, child, c2)
CellFace(child, c1, c0)
CellFace(child, c0, c2)
dividingLink.delete()
f1.delete()
f2.delete()
def nml(self) : # calc vertex normal from face normal
if len(self.faces)==0 :
return IVec(0,0,1)
n = IVec(0,0,0)
for f in self.faces :
n.add(f.nml())
return n.unit()
def createChild(self, dir) :
self.radius *= 0.5 #make both cell size half
dir.len(self.radius)
child = Cell(self.pos().cp(dir), self.radius)
self.pos().sub(dir) # move to the other way
self.active = False #reset activation
return child
class CellLink(IAgent) : # a link to connect 2 cells with spring force
maxForce = 100
def __init__(self, c1, c2) :
IAgent.__init__(self)
self.cell1 = c1
self.cell2 = c2
self.cell1.links.append(self) # register this link to cells{
self.cell2.links.append(self)
self.faces = []
def interact(self, agents) :
# spring force
dif = self.cell1.pos().dif(self.cell2.pos())
force = (dif.len()-(self.cell1.radius+self.cell2.radius))/(self.cell1.radius+self.cell2.radius)*300
if force > CellLink.maxForce : # if putting too much force
force = CellLink.maxForce
elif force < -CellLink.maxForce :
force = -CellLink.maxForce
dif.len(force)
self.cell1.pull(dif)
self.cell2.push(dif)
def contains(self, c) : #check if link contains the cell
if c is self.cell1 or c is self.cell2 :
return True
return False
def delete(self) :
self.cell1.links.remove(self) # unregister from cells
self.cell2.links.remove(self)
self.del() # stop agent
def oppositeCell(self, c) : # find other cell on the link
if self.cell1 is c :
return self.cell2
if self.cell2 is c :
return self.cell1
print("Link does not contain the input cell")
return None
def oppositeDir(self, c) : #calculate a vector to the other cell
return self.oppositeCell(c).pos().dif(c.pos())
class CellFace : # a triangle grouping 3 cells and 3 links
def __init__(self, c1, c2, c3) :
self.link1 = self.findLink(c1, c2)
# keep order of cells in right hand screw for consistent normal
if len(self.link1.faces)==1 and self.link1.faces[0].cellOrder(c1,c2) :
self.cell1 = c2
self.cell2 = c1
self.cell3 = c3
else :
self.cell1 = c1
self.cell2 = c2
self.cell3 = c3
self.link1 = self.findLink(self.cell1, self.cell2)
self.link2 = self.findLink(self.cell2, self.cell3)
self.link3 = self.findLink(self.cell3, self.cell1)
self.cell1.faces.append(self) # register this face to cells and links
self.cell2.faces.append(self)
self.cell3.faces.append(self)
self.link1.faces.append(self)
self.link2.faces.append(self)
self.link3.faces.append(self)
self.face = IFace(self.cell1.vertex,self.cell2.vertex,self.cell3.vertex)
mesh.addFace(self.face) # add triangular face to the mesh
def center(self) : # calc center of triangle
return IVec.center(self.cell1.pos(), self.cell2.pos(), self.cell3.pos())
def nml(self) : # normal vector
return self.cell1.pos().nml(self.cell2.pos(), self.cell3.pos()).unit()
# True if ordr of c1-c2 follows the order of cell1-cell2-cell3, otherwise False
def cellOrder(self, c1, c2) :
if ( self.cell1 is c1 and self.cell2 is c2 or
self.cell2 is c1 and self.cell3 is c2 or
self.cell3 is c1 and self.cell1 is c2 ) :
return True
return False
def contains(self, link) : # check if the link is contained
return self.link1 is link or self.link2 is link or self.link3 is link
def findLink(self, c1, c2) : # find a link between 2 cells
for l in c1.links :
if l.contains(c2) :
return l
print("link not found")
return None
def oppositeCell(self, l) : # find a cell opposite of a link edge in a triangle
if self.cell1 is not l.cell1 and self.cell1 is not l.cell2 :
return self.cell1
if self.cell2 is not l.cell1 and self.cell2 is not l.cell2 :
return self.cell2
return self.cell3
def delete(self) :
self.cell1.faces.remove(self) # unregister self from cells and links
self.cell2.faces.remove(self)
self.cell3.faces.remove(self)
self.link1.faces.remove(self)
self.link2.faces.remove(self)
self.link3.faces.remove(self)
mesh.deleteFace(self.face)
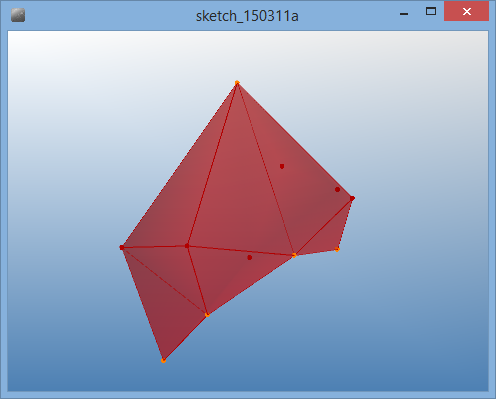
Closed Surface Formation and Face Division

The code generates closed polygon mesh by forming a tetrahedron after cells form a triangle. Once the network of cells, links and faces form a tetrahedron, the division algorithm never makes any holes and keep the whole mesh surface closed.

![]()
![]()
![]()
add_library('igeo')
mesh = None # global variable of mesh geometry
def setup() :
size(480,360,IG.GL)
IConfig.syncDrawAndDynamics=True #not to crash when some geometry is deleted while drawing
mesh = IMesh().clr(0.7,0,0)
cell = Cell(IVec(0,0,0), 10)
class Cell(IParticle) :
growthDuration = 1000 #duration of growth and division
growthInterval = 10
divisionInterval = 50
maxRadius = 100
growthSpeed=0.1
def __init__(self, pos, rad) :
IParticle.__init__(self, pos, IVec(0,0,0))
self.radius = rad
self.links = [] #store links
self.faces = [] #store faces
self.active = False
self.vertex = IVertex(self.pos())
self.fric(0.2)
def interact(self, agents) :
neighborCenter = IVec(0,0,0)
neighborCount=0
neighborDist = self.radius*4
for a in agents :
if isinstance(a, Cell) :
if a is not self :
# push if closer than two radii
if a.pos().dist(self.pos()) < a.radius+self.radius :
dif = a.pos().dif(self.pos())
dif.len(((a.radius+self.radius)-dif.len())*100+50) # the closer the harder to push
a.push(dif)
# count neighbors and calculate their center
if a.pos().dist(self.pos()) < a.radius+self.radius + neighborDist :
neighborCenter.add(a.pos())
neighborCount+=1
if neighborCount >= 1 : # push from center of neighbors
neighborCenter.div(neighborCount)
dif = self.pos().dif(neighborCenter).len(50) # constant force
self.push(dif)
def update(self) :
if IG.time() < Cell.growthDuration :
if self.time() > 0 and self.time()%Cell.divisionInterval==0 :
if self.active : # divide when active flag is on
self.divide()
if IRand.pct(50) : # random division
self.active = True
if self.time()%Cell.growthInterval==0 :
self.grow()
if self.active : # update color by being active
self.clr(1.0,0.5,0)
else :
self.clr(mesh.clr())
self.vertex.pos().set(self.pos()) # update mesh vertex position
self.vertex.nml(self.nml()) # update mesh vertex normal
def grow(self) : # growing cell size
if self.radius < Cell.maxRadius :
self.radius += Cell.growthSpeed
def divide(self) : # cell division
if len(self.links)==0 : # dot state
child = self.createChild(IRand.dir())
CellLink(self, child) # add one link
elif len(self.links)==1 : # line state
# making a triangle loop
child = self.createChild(IRand.dir())
CellLink(child, self.links[0].cell1)
CellLink(child, self.links[0].cell2)
CellFace(child, self.links[0].cell1, self.links[0].cell2) # making a triangle face
elif len(self.links)==2 : # triangle
# making a tetrahedron enclosure
child = self.createChild(IRand.dir())
f = self.faces[0]
center = IVec.center(child.pos(),f.cell1.pos(),f.cell2.pos(),f.cell3.pos())
if f.center().dif(center).dot(f.nml())<0 :
f.flipNml() # adjust normal to be outward
CellLink(f.cell1, child)
CellLink(f.cell2, child)
CellLink(f.cell3, child)
f1 = CellFace(f.cell1, f.cell2, child)
f2 = CellFace(f.cell2, f.cell3, child)
f3 = CellFace(f.cell3, f.cell1, child)
if f1.center().dif(center).dot(f1.nml())<0 :
f1.flipNml()
if f2.center().dif(center).dot(f2.nml())<0 :
f2.flipNml()
if f3.center().dif(center).dot(f3.nml())<0 :
f3.flipNml()
else : # link num > 3
# divide one face
dividingFace = self.faces[IRand.getInt(0,len(self.faces)-1)]
c = dividingFace.oppositeCells(self)
dir = dividingFace.center().dif(self.pos())
dir.projectToPlane(self.nml())
child = self.createChild(dir)
# delete 1 face, create 3 links + 3 faces
CellLink(self, child)
CellLink(child, c[0])
CellLink(child, c[1])
CellFace(self, c[0], child)
CellFace(self, child, c[1])
CellFace(child, c[0], c[1])
dividingFace.delete()
def nml(self) : # calc vertex normal from face normal
if len(self.faces)==0 :
return IVec(0,0,1)
n = IVec(0,0,0)
for f in self.faces :
n.add(f.nml())
return n.unit()
def createChild(self, dir) :
self.radius *= 0.5 #make both cell size half
dir.len(self.radius)
child = Cell(self.pos().cp(dir), self.radius)
self.pos().sub(dir) # move to the other way
self.active = False #reset activation
return child
class CellLink(IAgent) : # a link to connect 2 cells with spring force
maxForce = 100
def __init__(self, c1, c2) :
IAgent.__init__(self)
self.cell1 = c1
self.cell2 = c2
self.cell1.links.append(self) # register this link to cells{
self.cell2.links.append(self)
self.faces = []
def interact(self, agents) :
# spring force
dif = self.cell1.pos().dif(self.cell2.pos())
force = (dif.len()-(self.cell1.radius+self.cell2.radius))/(self.cell1.radius+self.cell2.radius)*300
if force > CellLink.maxForce : # if putting too much force
force = CellLink.maxForce
elif force < -CellLink.maxForce :
force = -CellLink.maxForce
dif.len(force)
self.cell1.pull(dif)
self.cell2.push(dif)
def contains(self, c) : #check if link contains the cell
if c is self.cell1 or c is self.cell2 :
return True
return False
def delete(self) :
self.cell1.links.remove(self) # unregister from cells
self.cell2.links.remove(self)
self.del() # stop agent
def oppositeCell(self, c) : # find other cell on the link
if self.cell1 is c :
return self.cell2
if self.cell2 is c :
return self.cell1
print("Link does not contain the input cell")
return None
def oppositeDir(self, c) : #calculate a vector to the other cell
return self.oppositeCell(c).pos().dif(c.pos())
class CellFace : # a triangle grouping 3 cells and 3 links
def __init__(self, c1, c2, c3) :
self.link1 = self.findLink(c1, c2)
# keep order of cells in right hand screw for consistent normal
if len(self.link1.faces)==1 and self.link1.faces[0].cellOrder(c1,c2) :
self.cell1 = c2
self.cell2 = c1
self.cell3 = c3
else :
self.cell1 = c1
self.cell2 = c2
self.cell3 = c3
self.link1 = self.findLink(self.cell1, self.cell2)
self.link2 = self.findLink(self.cell2, self.cell3)
self.link3 = self.findLink(self.cell3, self.cell1)
self.cell1.faces.append(self) # register this face to cells and links
self.cell2.faces.append(self)
self.cell3.faces.append(self)
self.link1.faces.append(self)
self.link2.faces.append(self)
self.link3.faces.append(self)
self.face = IFace(self.cell1.vertex,self.cell2.vertex,self.cell3.vertex)
mesh.addFace(self.face) # add triangular face to the mesh
def center(self) : # calc center of triangle
return IVec.center(self.cell1.pos(), self.cell2.pos(), self.cell3.pos())
def nml(self) : # normal vector
return self.cell1.pos().nml(self.cell2.pos(), self.cell3.pos()).unit()
def flipNml(self) : # flip normal
tmp = self.cell2
tmpLink = self.link2
self.cell2 = self.cell3
self.link2 = self.link3
self.cell3 = tmp
self.link3 = tmpLink
# True if ordr of c1-c2 follows the order of cell1-cell2-cell3, otherwise False
def cellOrder(self, c1, c2) :
if ( self.cell1 is c1 and self.cell2 is c2 or
self.cell2 is c1 and self.cell3 is c2 or
self.cell3 is c1 and self.cell1 is c2 ) :
return True
return False
def contains(self, link) : # check if the link is contained
return self.link1 is link or self.link2 is link or self.link3 is link
def findLink(self, c1, c2) : # find a link between 2 cells
for l in c1.links :
if l.contains(c2) :
return l
print("link not found")
return None
def oppositeCells(self, c) : # find 2 cells opposite of a cell in a triangle
if self.cell1 is c :
return [ self.cell2, self.cell3 ]
if self.cell2 is c :
return [ self.cell3, self.cell1 ]
if self.cell3 is c :
return [ self.cell1, self.cell2 ]
return None
def oppositeCell(self, l) : # find a cell opposite of a link edge in a triangle
if self.cell1 is not l.cell1 and self.cell1 is not l.cell2 :
return self.cell1
if self.cell2 is not l.cell1 and self.cell2 is not l.cell2 :
return self.cell2
return self.cell3
def delete(self) :
self.cell1.faces.remove(self) # unregister self from cells and links
self.cell2.faces.remove(self)
self.cell3.faces.remove(self)
self.link1.faces.remove(self)
self.link2.faces.remove(self)
self.link3.faces.remove(self)
mesh.deleteFace(self.face)
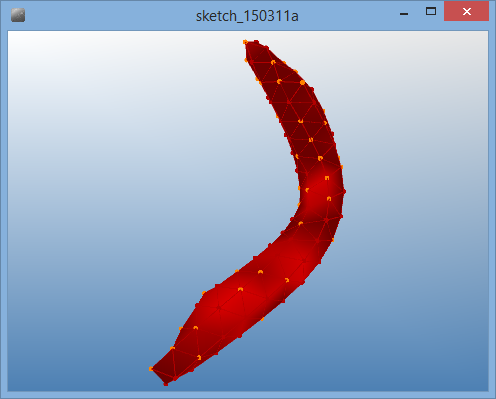
Interior Edge Division on Closed Surface
![]()
![]()
![]()
add_library('igeo')
mesh = None # global variable of mesh geometry
def setup() :
size(480,360,IG.GL)
IConfig.syncDrawAndDynamics=True #not to crash when some geometry is deleted while drawing
mesh = IMesh().clr(0.7,0,0)
cell = Cell(IVec(0,0,0), 10)
class Cell(IParticle) :
growthDuration = 1000 #duration of growth and division
growthInterval = 10
divisionInterval = 50
maxRadius = 100
growthSpeed=0.1
def __init__(self, pos, rad) :
IParticle.__init__(self, pos, IVec(0,0,0))
self.radius = rad
self.links = [] #store links
self.faces = [] #store faces
self.active = False
self.vertex = IVertex(self.pos())
self.fric(0.2)
def interact(self, agents) :
neighborCenter = IVec(0,0,0)
neighborCount=0
neighborDist = self.radius*4
for a in agents :
if isinstance(a, Cell) :
if a is not self :
# push if closer than two radii
if a.pos().dist(self.pos()) < a.radius+self.radius :
dif = a.pos().dif(self.pos())
dif.len(((a.radius+self.radius)-dif.len())*100+50) # the closer the harder to push
a.push(dif)
# count neighbors and calculate their center
if a.pos().dist(self.pos()) < a.radius+self.radius + neighborDist :
neighborCenter.add(a.pos())
neighborCount+=1
if neighborCount >= 1 : # push from center of neighbors
neighborCenter.div(neighborCount)
dif = self.pos().dif(neighborCenter).len(50) # constant force
self.push(dif)
def update(self) :
if IG.time() < Cell.growthDuration :
if self.time() > 0 and self.time()%Cell.divisionInterval==0 :
if self.active : # divide when active flag is on
self.divide()
if IRand.pct(50) : # random division
self.active = True
if self.time()%Cell.growthInterval==0 :
self.grow()
if self.active : # update color by being active
self.clr(1.0,0.5,0)
else :
self.clr(mesh.clr())
self.vertex.pos().set(self.pos()) # update mesh vertex position
self.vertex.nml(self.nml()) # update mesh vertex normal
def grow(self) : # growing cell size
if self.radius < Cell.maxRadius :
self.radius += Cell.growthSpeed
def divide(self) : # cell division
if len(self.links)==0 : # dot state
child = self.createChild(IRand.dir())
CellLink(self, child) # add one link
elif len(self.links)==1 : # line state
# making a triangle loop
child = self.createChild(IRand.dir())
CellLink(child, self.links[0].cell1)
CellLink(child, self.links[0].cell2)
CellFace(child, self.links[0].cell1, self.links[0].cell2) # making a triangle face
elif len(self.links)==2 : # triangle
# making a tetrahedron enclosure
child = self.createChild(IRand.dir())
f = self.faces[0]
center = IVec.center(child.pos(),f.cell1.pos(),f.cell2.pos(),f.cell3.pos())
if f.center().dif(center).dot(f.nml())<0 :
f.flipNml() # adjust normal to be outward
CellLink(f.cell1, child)
CellLink(f.cell2, child)
CellLink(f.cell3, child)
f1 = CellFace(f.cell1, f.cell2, child)
f2 = CellFace(f.cell2, f.cell3, child)
f3 = CellFace(f.cell3, f.cell1, child)
if f1.center().dif(center).dot(f1.nml())<0 :
f1.flipNml()
if f2.center().dif(center).dot(f2.nml())<0 :
f2.flipNml()
if f3.center().dif(center).dot(f3.nml())<0 :
f3.flipNml()
else : # link num > 3
# divide one link
dividingLink = self.links[IRand.getInt(0,len(self.links)-1)]
dir = dividingLink.oppositeDir(self)
dir.projectToPlane(self.nml())
child = self.createChild(dir)
f1 = dividingLink.faces[0]
f2 = dividingLink.faces[1]
c0 = dividingLink.oppositeCell(self)
c1 = f1.oppositeCell(dividingLink)
c2 = f2.oppositeCell(dividingLink)
# delete 1 link + 2 faces, create 4 links + 4 faces
CellLink(self, child)
CellLink(c0, child)
CellLink(c1, child)
CellLink(c2, child)
CellFace(self, c1, child)
CellFace(self, child, c2)
CellFace(child, c1, c0)
CellFace(child, c0, c2)
dividingLink.delete()
f1.delete()
f2.delete()
def nml(self) : # calc vertex normal from face normal
if len(self.faces)==0 :
return IVec(0,0,1)
n = IVec(0,0,0)
for f in self.faces :
n.add(f.nml())
return n.unit()
def createChild(self, dir) :
self.radius *= 0.5 #make both cell size half
dir.len(self.radius)
child = Cell(self.pos().cp(dir), self.radius)
self.pos().sub(dir) # move to the other way
self.active = False #reset activation
return child
class CellLink(IAgent) : # a link to connect 2 cells with spring force
maxForce = 100
def __init__(self, c1, c2) :
IAgent.__init__(self)
self.cell1 = c1
self.cell2 = c2
self.cell1.links.append(self) # register this link to cells{
self.cell2.links.append(self)
self.faces = []
def interact(self, agents) :
# spring force
dif = self.cell1.pos().dif(self.cell2.pos())
force = (dif.len()-(self.cell1.radius+self.cell2.radius))/(self.cell1.radius+self.cell2.radius)*300
if force > CellLink.maxForce : # if putting too much force
force = CellLink.maxForce
elif force < -CellLink.maxForce :
force = -CellLink.maxForce
dif.len(force)
self.cell1.pull(dif)
self.cell2.push(dif)
def contains(self, c) : #check if link contains the cell
if c is self.cell1 or c is self.cell2 :
return True
return False
def delete(self) :
self.cell1.links.remove(self) # unregister from cells
self.cell2.links.remove(self)
self.del() # stop agent
def oppositeCell(self, c) : # find other cell on the link
if self.cell1 is c :
return self.cell2
if self.cell2 is c :
return self.cell1
print("Link does not contain the input cell")
return None
def oppositeDir(self, c) : #calculate a vector to the other cell
return self.oppositeCell(c).pos().dif(c.pos())
class CellFace : # a triangle grouping 3 cells and 3 links
def __init__(self, c1, c2, c3) :
self.link1 = self.findLink(c1, c2)
# keep order of cells in right hand screw for consistent normal
if len(self.link1.faces)==1 and self.link1.faces[0].cellOrder(c1,c2) :
self.cell1 = c2
self.cell2 = c1
self.cell3 = c3
else :
self.cell1 = c1
self.cell2 = c2
self.cell3 = c3
self.link1 = self.findLink(self.cell1, self.cell2)
self.link2 = self.findLink(self.cell2, self.cell3)
self.link3 = self.findLink(self.cell3, self.cell1)
self.cell1.faces.append(self) # register this face to cells and links
self.cell2.faces.append(self)
self.cell3.faces.append(self)
self.link1.faces.append(self)
self.link2.faces.append(self)
self.link3.faces.append(self)
self.face = IFace(self.cell1.vertex,self.cell2.vertex,self.cell3.vertex)
mesh.addFace(self.face) # add triangular face to the mesh
def center(self) : # calc center of triangle
return IVec.center(self.cell1.pos(), self.cell2.pos(), self.cell3.pos())
def nml(self) : # normal vector
return self.cell1.pos().nml(self.cell2.pos(), self.cell3.pos()).unit()
def flipNml(self) : # flip normal
tmp = self.cell2
tmpLink = self.link2
self.cell2 = self.cell3
self.link2 = self.link3
self.cell3 = tmp
self.link3 = tmpLink
# True if ordr of c1-c2 follows the order of cell1-cell2-cell3, otherwise False
def cellOrder(self, c1, c2) :
if ( self.cell1 is c1 and self.cell2 is c2 or
self.cell2 is c1 and self.cell3 is c2 or
self.cell3 is c1 and self.cell1 is c2 ) :
return True
return False
def contains(self, link) : # check if the link is contained
return self.link1 is link or self.link2 is link or self.link3 is link
def findLink(self, c1, c2) : # find a link between 2 cells
for l in c1.links :
if l.contains(c2) :
return l
print("link not found")
return None
def oppositeCells(self, c) : # find 2 cells opposite of a cell in a triangle
if self.cell1 is c :
return [ self.cell2, self.cell3 ]
if self.cell2 is c :
return [ self.cell3, self.cell1 ]
if self.cell3 is c :
return [ self.cell1, self.cell2 ]
return None
def oppositeCell(self, l) : # find a cell opposite of a link edge in a triangle
if self.cell1 is not l.cell1 and self.cell1 is not l.cell2 :
return self.cell1
if self.cell2 is not l.cell1 and self.cell2 is not l.cell2 :
return self.cell2
return self.cell3
def delete(self) :
self.cell1.faces.remove(self) # unregister self from cells and links
self.cell2.faces.remove(self)
self.cell3.faces.remove(self)
self.link1.faces.remove(self)
self.link2.faces.remove(self)
self.link3.faces.remove(self)
mesh.deleteFace(self.face)

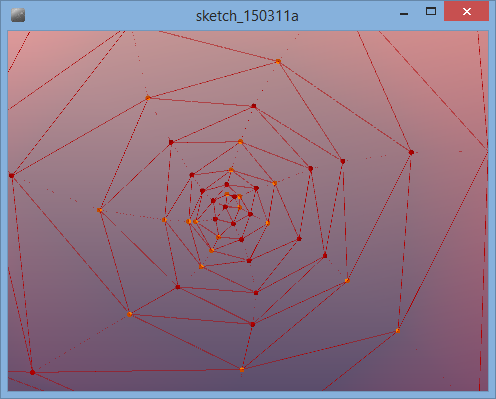
Finding Edges to Divide on Closed Surface
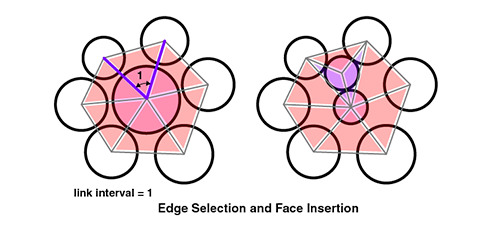
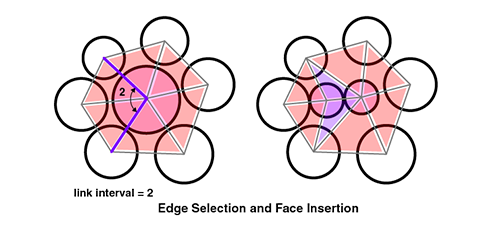
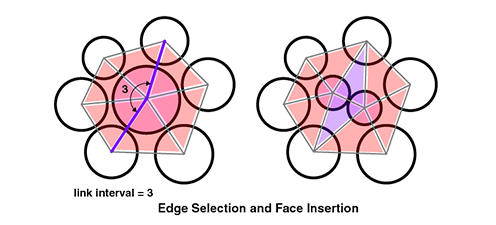
This division algorithm is organized in several methods in addition to divide method. The two edges for division is selected at findDividingLinks method. To check the interval of two edges, the code needs to know which edge is next to each other and order of edges. For this purpose, sortLinks methods sorts the stored CellLink instances. insertChild method reconnect links and faces with a new child cell by deleting existing links and faces and creating new ones.
![]()
![]()
![]()
add_library('igeo')
mesh = None # global variable of mesh geometry
def setup() :
size(480,360,IG.GL)
IConfig.syncDrawAndDynamics=True #not to crash when some geometry is deleted while drawing
mesh = IMesh().clr(0.7,0,0)
cell = Cell(IVec(0,0,0), 10)
class Cell(IParticle) :
growthDuration = 1200 #duration of growth and division
growthInterval = 10
divisionInterval = 50
maxRadius = 100
growthSpeed=0.1
def __init__(self, pos, rad) :
IParticle.__init__(self, pos, IVec(0,0,0))
self.radius = rad
self.links = [] #store links
self.faces = [] #store faces
self.active = False
self.vertex = IVertex(self.pos())
self.fric(0.2)
def interact(self, agents) :
neighborCenter = IVec(0,0,0)
neighborCount=0
neighborDist = self.radius*4
for a in agents :
if isinstance(a, Cell) :
if a is not self :
# push if closer than two radii
if a.pos().dist(self.pos()) < a.radius+self.radius :
dif = a.pos().dif(self.pos())
dif.len(((a.radius+self.radius)-dif.len())*100+50) # the closer the harder to push
a.push(dif)
# count neighbors and calculate their center
if a.pos().dist(self.pos()) < a.radius+self.radius + neighborDist :
neighborCenter.add(a.pos())
neighborCount+=1
if neighborCount >= 1 : # push from center of neighbors
neighborCenter.div(neighborCount)
dif = self.pos().dif(neighborCenter).len(50) # constant force
self.push(dif)
self.push(self.nml().len(20)) # pressure toward normal
def update(self) :
if IG.time() < Cell.growthDuration :
if self.time() > 0 and self.time()%Cell.divisionInterval==0 :
if self.active : # divide when active flag is on
self.divide()
if IRand.pct(50) : # random division
self.active = True
if self.time()%Cell.growthInterval==0 :
self.grow()
if self.active : # update color by being active
self.clr(1.0,0.5,0)
else :
self.clr(mesh.clr())
self.vertex.pos().set(self.pos()) # update mesh vertex position
self.vertex.nml(self.nml()) # update mesh vertex normal
def grow(self) : # growing cell size
if self.radius < Cell.maxRadius :
self.radius += Cell.growthSpeed
def divide(self) : # cell division
if len(self.links)==0 : # dot state
child = self.createChild(IRand.dir())
CellLink(self, child) # add one link
elif len(self.links)==1 : # line state
# making a triangle loop
child = self.createChild(IRand.dir())
CellLink(child, self.links[0].cell1)
CellLink(child, self.links[0].cell2)
CellFace(child, self.links[0].cell1, self.links[0].cell2) # making a triangle face
elif len(self.links)==2 : # triangle
# making a tetrahedron enclosure
child = self.createChild(IRand.dir())
f = self.faces[0]
center = IVec.center(child.pos(),f.cell1.pos(),f.cell2.pos(),f.cell3.pos())
if f.center().dif(center).dot(f.nml())<0 :
f.flipNml() # adjust normal to be outward
CellLink(f.cell1, child)
CellLink(f.cell2, child)
CellLink(f.cell3, child)
f1 = CellFace(f.cell1, f.cell2, child)
f2 = CellFace(f.cell2, f.cell3, child)
f3 = CellFace(f.cell3, f.cell1, child)
if f1.center().dif(center).dot(f1.nml())<0 :
f1.flipNml()
if f2.center().dif(center).dot(f2.nml())<0 :
f2.flipNml()
if f3.center().dif(center).dot(f3.nml())<0 :
f3.flipNml()
else : # link num > 3
# pick two links and insert two faces between
linkIdx = self.findDividingLinks()
linksToChild = [] # links to reconnect to child
for i in range(linkIdx[0], linkIdx[1]+1) :
linksToChild.append(self.links[i%len(self.links)])
dir = IVec()
for l in linksToChild : # average of links1 dir
dir.add(l.oppositeDir(self).unit())
dir.projectToPlane(self.nml())
child = self.createChild(dir)
self.insertChild(child, linksToChild)
def nml(self) : # calc vertex normal from face normal
if len(self.faces)==0 :
return IVec(0,0,1)
n = IVec(0,0,0)
for f in self.faces :
n.add(f.nml())
return n.unit()
def createChild(self, dir) :
self.radius *= 0.5 #make both cell size half
dir.len(self.radius)
child = Cell(self.pos().cp(dir), self.radius)
self.pos().sub(dir) # move to the other way
self.active = False #reset activation
return child
def sortLinks(self) : # sort links by following connected faces
if len(self.links) <= 3 :
return # no need to sort
sorted = []
currentLink = self.links[0]
currentFace = currentLink.faces[0]
for i in range(len(self.links)) :
sorted.append(currentLink)
currentLink = currentFace.oppositeLink(currentLink.oppositeCell(self))
currentFace = currentLink.oppositeFace(currentFace)
self.links = sorted
def findDividingLinks(self) : # find splittable two links and return the index numbers
linkInterval = len(self.links)//2 # interval between two links
self.sortLinks() # sort the order of links around cell
idx = IRand.getInt(0,len(self.links)-1)
return [ idx, idx+linkInterval ] # index can be larger than self.links.size()
def insertChild(self, child, linksToChild) : # insert child cell and reconnect links
removingFaces = []
for f in self.faces :
for j in range(len(linksToChild)-1) :
if (f.contains(linksToChild[j]) and
f.contains(linksToChild[j+1])) : #a face between replacing links is removed
removingFaces.append(f)
break
for i in range(1, len(linksToChild)-1) :
linksToChild[i].delete() # replacing links are once removed
CellLink(linksToChild[i].oppositeCell(self), child) # then recreated
cell1 = linksToChild[0].oppositeCell(self) # one of two dividing link cell
cell2 = linksToChild[len(linksToChild)-1].oppositeCell(self) # another dividing link cell
CellLink(child, cell1)
CellLink(child, cell2)
CellLink(self, child)
for f in removingFaces :
f.delete() # replace face by deleting and recreating
cells = f.oppositeCell(self)
CellFace(child, cells[0], cells[1])
CellFace(self, cell1, child)
CellFace(self, child, cell2)
class CellLink(IAgent) : # a link to connect 2 cells with spring force
maxForce = 100
def __init__(self, c1, c2) :
IAgent.__init__(self)
self.cell1 = c1
self.cell2 = c2
self.cell1.links.append(self) # register this link to cells{
self.cell2.links.append(self)
self.faces = []
def interact(self, agents) :
# spring force
dif = self.cell1.pos().dif(self.cell2.pos())
force = (dif.len()-(self.cell1.radius+self.cell2.radius))/(self.cell1.radius+self.cell2.radius)*300
if force > CellLink.maxForce : # if putting too much force
force = CellLink.maxForce
elif force < -CellLink.maxForce :
force = -CellLink.maxForce
dif.len(force)
self.cell1.pull(dif)
self.cell2.push(dif)
def contains(self, c) : #check if link contains the cell
if c is self.cell1 or c is self.cell2 :
return True
return False
def delete(self) :
self.cell1.links.remove(self) # unregister from cells
self.cell2.links.remove(self)
self.del() # stop agent
def oppositeFace(self, f) : # find other face on the link
if len(self.faces)!=2 :
return None
if self.faces[0] is f :
return self.faces[1]
return self.faces[0]
def oppositeCell(self, c) : # find other cell on the link
if self.cell1 is c :
return self.cell2
if self.cell2 is c :
return self.cell1
print("Link does not contain the input cell")
return None
def oppositeDir(self, c) : #calculate a vector to the other cell
return self.oppositeCell(c).pos().dif(c.pos())
class CellFace : # a triangle grouping 3 cells and 3 links
def __init__(self, c1, c2, c3) :
self.link1 = self.findLink(c1, c2)
# keep order of cells in right hand screw for consistent normal
if len(self.link1.faces)==1 and self.link1.faces[0].cellOrder(c1,c2) :
self.cell1 = c2
self.cell2 = c1
self.cell3 = c3
else :
self.cell1 = c1
self.cell2 = c2
self.cell3 = c3
self.link1 = self.findLink(self.cell1, self.cell2)
self.link2 = self.findLink(self.cell2, self.cell3)
self.link3 = self.findLink(self.cell3, self.cell1)
self.cell1.faces.append(self) # register this face to cells and links
self.cell2.faces.append(self)
self.cell3.faces.append(self)
self.link1.faces.append(self)
self.link2.faces.append(self)
self.link3.faces.append(self)
self.face = IFace(self.cell1.vertex,self.cell2.vertex,self.cell3.vertex)
mesh.addFace(self.face) # add triangular face to the mesh
def center(self) : # calc center of triangle
return IVec.center(self.cell1.pos(), self.cell2.pos(), self.cell3.pos())
def nml(self) : # normal vector
return self.cell1.pos().nml(self.cell2.pos(), self.cell3.pos()).unit()
def flipNml(self) : # flip normal
tmp = self.cell2
tmpLink = self.link2
self.cell2 = self.cell3
self.link2 = self.link3
self.cell3 = tmp
self.link3 = tmpLink
# True if ordr of c1-c2 follows the order of cell1-cell2-cell3, otherwise False
def cellOrder(self, c1, c2) :
if ( self.cell1 is c1 and self.cell2 is c2 or
self.cell2 is c1 and self.cell3 is c2 or
self.cell3 is c1 and self.cell1 is c2 ) :
return True
return False
def contains(self, link) : # check if the link is contained
return self.link1 is link or self.link2 is link or self.link3 is link
def findLink(self, c1, c2) : # find a link between 2 cells
for l in c1.links :
if l.contains(c2) :
return l
print("link not found")
return None
def oppositeCell(self, c) : # find 2 cells opposite of a cell in a triangle
if self.cell1 is c :
return [ self.cell2, self.cell3 ]
if self.cell2 is c :
return [ self.cell3, self.cell1 ]
if self.cell3 is c :
return [ self.cell1, self.cell2 ]
return None
def oppositeLink(self, c) : # find opposite link of a cell in a triangle
if not self.link1.contains(c) :
return self.link1
if not self.link2.contains(c) :
return self.link2
if not self.link3.contains(c) :
return self.link3
return None
def delete(self) :
self.cell1.faces.remove(self) # unregister self from cells and links
self.cell2.faces.remove(self)
self.cell3.faces.remove(self)
self.link1.faces.remove(self)
self.link2.faces.remove(self)
self.link3.faces.remove(self)
mesh.deleteFace(self.face)

Division Control by Maximum Link Count
![]()
![]()
![]()
add_library('igeo')
mesh = None # global variable of mesh geometry
def setup() :
size(480,360,IG.GL)
IConfig.syncDrawAndDynamics=True #not to crash when some geometry is deleted while drawing
mesh = IMesh().clr(0.7,0,0)
cell = Cell(IVec(0,0,0), 10)
class Cell(IParticle) :
growthDuration = 20000 #duration of growth and division
growthInterval = 10
divisionInterval = 50
maxRadius = 100
growthSpeed=0.1
maxLink = 6 #limit on number of links per cell
def __init__(self, pos, rad) :
IParticle.__init__(self, pos, IVec(0,0,0))
self.radius = rad
self.links = [] #store links
self.faces = [] #store faces
self.active = False
self.vertex = IVertex(self.pos())
self.fric(0.2)
def interact(self, agents) :
neighborCenter = IVec(0,0,0)
neighborCount=0
neighborDist = self.radius*4
for a in agents :
if isinstance(a, Cell) :
if a is not self :
# push if closer than two radii
if a.pos().dist(self.pos()) < a.radius+self.radius :
dif = a.pos().dif(self.pos())
dif.len(((a.radius+self.radius)-dif.len())*100+50) # the closer the harder to push
a.push(dif)
# count neighbors and calculate their center
if a.pos().dist(self.pos()) < a.radius+self.radius + neighborDist :
neighborCenter.add(a.pos())
neighborCount+=1
if neighborCount >= 1 : # push from center of neighbors
neighborCenter.div(neighborCount)
dif = self.pos().dif(neighborCenter).len(50) # constant force
self.push(dif)
self.push(self.nml().len(20)) # pressure toward normal
def update(self) :
if IG.time() < Cell.growthDuration :
if self.time() > 0 and self.time()%Cell.divisionInterval==0 :
if self.active : # divide when active flag is on
self.divide()
if IRand.pct(50) : # random division
self.active = True
if self.time()%Cell.growthInterval==0 :
self.grow()
if self.active : # update color by being active
self.clr(1.0,0.5,0)
else :
self.clr(mesh.clr())
self.vertex.pos().set(self.pos()) # update mesh vertex position
self.vertex.nml(self.nml()) # update mesh vertex normal
def grow(self) : # growing cell size
if self.radius < Cell.maxRadius :
self.radius += Cell.growthSpeed
def divide(self) : # cell division
if len(self.links)==0 : # dot state
child = self.createChild(IRand.dir())
CellLink(self, child) # add one link
elif len(self.links)==1 : # line state
# making a triangle loop
child = self.createChild(IRand.dir())
CellLink(child, self.links[0].cell1)
CellLink(child, self.links[0].cell2)
CellFace(child, self.links[0].cell1, self.links[0].cell2) # making a triangle face
elif len(self.links)==2 : # triangle
# making a tetrahedron enclosure
child = self.createChild(IRand.dir())
f = self.faces[0]
center = IVec.center(child.pos(),f.cell1.pos(),f.cell2.pos(),f.cell3.pos())
if f.center().dif(center).dot(f.nml())<0 :
f.flipNml() # adjust normal to be outward
CellLink(f.cell1, child)
CellLink(f.cell2, child)
CellLink(f.cell3, child)
f1 = CellFace(f.cell1, f.cell2, child)
f2 = CellFace(f.cell2, f.cell3, child)
f3 = CellFace(f.cell3, f.cell1, child)
if f1.center().dif(center).dot(f1.nml())<0 :
f1.flipNml()
if f2.center().dif(center).dot(f2.nml())<0 :
f2.flipNml()
if f3.center().dif(center).dot(f3.nml())<0 :
f3.flipNml()
else : # link num > 3
# pick two links and insert two faces between
linkIdx = self.findDividingLinks()
if linkIdx is None : # no valid edge to split. skip division.
self.active = False
return
linksToChild = [] # links to reconnect to child
for i in range(linkIdx[0], linkIdx[1]+1) :
linksToChild.append(self.links[i%len(self.links)])
dir = IVec()
for l in linksToChild : # average of links1 dir
dir.add(l.oppositeDir(self).unit())
dir.projectToPlane(self.nml())
child = self.createChild(dir)
self.insertChild(child, linksToChild)
def nml(self) : # calc vertex normal from face normal
if len(self.faces)==0 :
return IVec(0,0,1)
n = IVec(0,0,0)
for f in self.faces :
n.add(f.nml())
return n.unit()
def createChild(self, dir) :
self.radius *= 0.5 #make both cell size half
dir.len(self.radius)
child = Cell(self.pos().cp(dir), self.radius)
self.pos().sub(dir) # move to the other way
self.active = False #reset activation
return child
def sortLinks(self) : # sort links by following connected faces
if len(self.links) <= 3 :
return # no need to sort
sorted = []
currentLink = self.links[0]
currentFace = currentLink.faces[0]
for i in range(len(self.links)) :
sorted.append(currentLink)
currentLink = currentFace.oppositeLink(currentLink.oppositeCell(self))
currentFace = currentLink.oppositeFace(currentFace)
self.links = sorted
def findDividingLinks(self) : # find splittable two links and return the index numbers
linkInterval = len(self.links)//2 # interval between two links
self.sortLinks() # sort the order of links around cell
if linkInterval==1 and len(self.links) >= Cell.maxLink : # dividing links next to each other adds one more link
return None
idx = IRand.getInt(0,len(self.links)-1)
for i in range(len(self.links)) : # check all pairs
c1 = self.links[(i+idx)%len(self.links)].oppositeCell(self)
c2 = self.links[(i+idx+linkInterval)%len(self.links)].oppositeCell(self)
if len(c1.links) < Cell.maxLink and len(c2.links) < Cell.maxLink : # division adds one link on the end of each dividing link
return [ i+idx, i+idx+linkInterval ] # index can be larger than self.links.size()
return None
def insertChild(self, child, linksToChild) : # insert child cell and reconnect links
removingFaces = []
for f in self.faces :
for j in range(len(linksToChild)-1) :
if (f.contains(linksToChild[j]) and
f.contains(linksToChild[j+1])) : #a face between replacing links is removed
removingFaces.append(f)
break
for i in range(1, len(linksToChild)-1) :
linksToChild[i].delete() # replacing links are once removed
CellLink(linksToChild[i].oppositeCell(self), child) # then recreated
cell1 = linksToChild[0].oppositeCell(self) # one of two dividing link cell
cell2 = linksToChild[len(linksToChild)-1].oppositeCell(self) # another dividing link cell
CellLink(child, cell1)
CellLink(child, cell2)
CellLink(self, child)
for f in removingFaces :
f.delete() # replace face by deleting and recreating
cells = f.oppositeCell(self)
CellFace(child, cells[0], cells[1])
CellFace(self, cell1, child)
CellFace(self, child, cell2)
class CellLink(IAgent) : # a link to connect 2 cells with spring force
maxForce = 100
def __init__(self, c1, c2) :
IAgent.__init__(self)
self.cell1 = c1
self.cell2 = c2
self.cell1.links.append(self) # register this link to cells{
self.cell2.links.append(self)
self.faces = []
def interact(self, agents) :
# spring force
dif = self.cell1.pos().dif(self.cell2.pos())
force = (dif.len()-(self.cell1.radius+self.cell2.radius))/(self.cell1.radius+self.cell2.radius)*300
if force > CellLink.maxForce : # if putting too much force
force = CellLink.maxForce
elif force < -CellLink.maxForce :
force = -CellLink.maxForce
dif.len(force)
self.cell1.pull(dif)
self.cell2.push(dif)
def contains(self, c) : #check if link contains the cell
if c is self.cell1 or c is self.cell2 :
return True
return False
def delete(self) :
self.cell1.links.remove(self) # unregister from cells
self.cell2.links.remove(self)
self.del() # stop agent
def oppositeFace(self, f) : # find other face on the link
if len(self.faces)!=2 :
return None
if self.faces[0] is f :
return self.faces[1]
return self.faces[0]
def oppositeCell(self, c) : # find other cell on the link
if self.cell1 is c :
return self.cell2
if self.cell2 is c :
return self.cell1
print("Link does not contain the input cell")
return None
def oppositeDir(self, c) : #calculate a vector to the other cell
return self.oppositeCell(c).pos().dif(c.pos())
class CellFace : # a triangle grouping 3 cells and 3 links
def __init__(self, c1, c2, c3) :
self.link1 = self.findLink(c1, c2)
# keep order of cells in right hand screw for consistent normal
if len(self.link1.faces)==1 and self.link1.faces[0].cellOrder(c1,c2) :
self.cell1 = c2
self.cell2 = c1
self.cell3 = c3
else :
self.cell1 = c1
self.cell2 = c2
self.cell3 = c3
self.link1 = self.findLink(self.cell1, self.cell2)
self.link2 = self.findLink(self.cell2, self.cell3)
self.link3 = self.findLink(self.cell3, self.cell1)
self.cell1.faces.append(self) # register this face to cells and links
self.cell2.faces.append(self)
self.cell3.faces.append(self)
self.link1.faces.append(self)
self.link2.faces.append(self)
self.link3.faces.append(self)
self.face = IFace(self.cell1.vertex,self.cell2.vertex,self.cell3.vertex)
mesh.addFace(self.face) # add triangular face to the mesh
def center(self) : # calc center of triangle
return IVec.center(self.cell1.pos(), self.cell2.pos(), self.cell3.pos())
def nml(self) : # normal vector
return self.cell1.pos().nml(self.cell2.pos(), self.cell3.pos()).unit()
def flipNml(self) : # flip normal
tmp = self.cell2
tmpLink = self.link2
self.cell2 = self.cell3
self.link2 = self.link3
self.cell3 = tmp
self.link3 = tmpLink
# True if ordr of c1-c2 follows the order of cell1-cell2-cell3, otherwise False
def cellOrder(self, c1, c2) :
if ( self.cell1 is c1 and self.cell2 is c2 or
self.cell2 is c1 and self.cell3 is c2 or
self.cell3 is c1 and self.cell1 is c2 ) :
return True
return False
def contains(self, link) : # check if the link is contained
return self.link1 is link or self.link2 is link or self.link3 is link
def findLink(self, c1, c2) : # find a link between 2 cells
for l in c1.links :
if l.contains(c2) :
return l
print("link not found")
return None
def oppositeCell(self, c) : # find 2 cells opposite of a cell in a triangle
if self.cell1 is c :
return [ self.cell2, self.cell3 ]
if self.cell2 is c :
return [ self.cell3, self.cell1 ]
if self.cell3 is c :
return [ self.cell1, self.cell2 ]
return None
def oppositeLink(self, c) : # find opposite link of a cell in a triangle
if not self.link1.contains(c) :
return self.link1
if not self.link2.contains(c) :
return self.link2
if not self.link3.contains(c) :
return self.link3
return None
def delete(self) :
self.cell1.faces.remove(self) # unregister self from cells and links
self.cell2.faces.remove(self)
self.cell3.faces.remove(self)
self.link1.faces.remove(self)
self.link2.faces.remove(self)
self.link3.faces.remove(self)
mesh.deleteFace(self.face)
Maximum Link Count and Probabilistic Allowance of Extra Link
![]()
![]()
![]()
add_library('igeo')
mesh = None # global variable of mesh geometry
def setup() :
size(480,360,IG.GL)
IConfig.syncDrawAndDynamics=True #not to crash when some geometry is deleted while drawing
mesh = IMesh().clr(0.7,0,0)
cell = Cell(IVec(0,0,0), 10)
cell.active = True
class Cell(IParticle) :
growthDuration = 2000 #duration of growth and division
growthInterval = 10
divisionInterval = 50
maxRadius = 100
growthSpeed=0.1
maxLink = 6 #limit on number of links per cell
extraLinkAllowance = 20 #percentage to accept one more link than maxLink
def __init__(self, pos, rad) :
IParticle.__init__(self, pos, IVec(0,0,0))
self.radius = rad
self.links = [] #store links
self.faces = [] #store faces
self.active = False
self.vertex = IVertex(self.pos())
self.fric(0.2)
def interact(self, agents) :
neighborCenter = IVec(0,0,0)
neighborCount=0
neighborDist = self.radius*4
for a in agents :
if isinstance(a, Cell) :
if a is not self :
# push if closer than two radii
if a.pos().dist(self.pos()) < a.radius+self.radius :
dif = a.pos().dif(self.pos())
dif.len(((a.radius+self.radius)-dif.len())*100+50) # the closer the harder to push
a.push(dif)
# count neighbors and calculate their center
if a.pos().dist(self.pos()) < a.radius+self.radius + neighborDist :
neighborCenter.add(a.pos())
neighborCount+=1
if neighborCount >= 1 : # push from center of neighbors
neighborCenter.div(neighborCount)
dif = self.pos().dif(neighborCenter).len(50) # constant force
self.push(dif)
self.push(self.nml().len(20)) # pressure toward normal
def update(self) :
if IG.time() < Cell.growthDuration :
if self.time() > 0 and self.time()%Cell.divisionInterval==0 :
if self.active : # divide when active flag is on
self.divide()
if IRand.pct(50) : # random division
self.active = True
if self.time()%Cell.growthInterval==0 :
self.grow()
if self.active : # update color by being active
self.clr(1.0,0.5,0)
else :
self.clr(mesh.clr())
self.vertex.pos().set(self.pos()) # update mesh vertex position
self.vertex.nml(self.nml()) # update mesh vertex normal
def grow(self) : # growing cell size
if self.radius < Cell.maxRadius :
self.radius += Cell.growthSpeed
def divide(self) : # cell division
if len(self.links)==0 : # dot state
child = self.createChild(IRand.dir())
CellLink(self, child) # add one link
elif len(self.links)==1 : # line state
# making a triangle loop
child = self.createChild(IRand.dir())
CellLink(child, self.links[0].cell1)
CellLink(child, self.links[0].cell2)
CellFace(child, self.links[0].cell1, self.links[0].cell2) # making a triangle face
elif len(self.links)==2 : # triangle
# making a tetrahedron enclosure
child = self.createChild(IRand.dir())
f = self.faces[0]
center = IVec.center(child.pos(),f.cell1.pos(),f.cell2.pos(),f.cell3.pos())
if f.center().dif(center).dot(f.nml())<0 :
f.flipNml() # adjust normal to be outward
CellLink(f.cell1, child)
CellLink(f.cell2, child)
CellLink(f.cell3, child)
f1 = CellFace(f.cell1, f.cell2, child)
f2 = CellFace(f.cell2, f.cell3, child)
f3 = CellFace(f.cell3, f.cell1, child)
if f1.center().dif(center).dot(f1.nml())<0 :
f1.flipNml()
if f2.center().dif(center).dot(f2.nml())<0 :
f2.flipNml()
if f3.center().dif(center).dot(f3.nml())<0 :
f3.flipNml()
else : # link num > 3
# pick two links and insert two faces between
linkIdx = self.findDividingLinks()
if linkIdx is None : # no valid edge to split. skip division.
self.active = False
return
linksToChild = [] # links to reconnect to child
for i in range(linkIdx[0], linkIdx[1]+1) :
linksToChild.append(self.links[i%len(self.links)])
dir = IVec()
for l in linksToChild : # average of links1 dir
dir.add(l.oppositeDir(self).unit())
dir.projectToPlane(self.nml())
child = self.createChild(dir)
self.insertChild(child, linksToChild)
def nml(self) : # calc vertex normal from face normal
if len(self.faces)==0 :
return IVec(0,0,1)
n = IVec(0,0,0)
for f in self.faces :
n.add(f.nml())
return n.unit()
def createChild(self, dir) :
self.radius *= 0.5 #make both cell size half
dir.len(self.radius)
child = Cell(self.pos().cp(dir), self.radius)
self.pos().sub(dir) # move to the other way
self.active = False #reset activation
return child
def sortLinks(self) : # sort links by following connected faces
if len(self.links) <= 3 :
return # no need to sort
sorted = []
currentLink = self.links[0]
currentFace = currentLink.faces[0]
for i in range(len(self.links)) :
sorted.append(currentLink)
currentLink = currentFace.oppositeLink(currentLink.oppositeCell(self))
currentFace = currentLink.oppositeFace(currentFace)
self.links = sorted
def findDividingLinks(self) : # find splittable two links and return the index numbers
linkInterval = len(self.links)//2 # interval between two links
self.sortLinks() # sort the order of links around cell
allowExtra = IRand.pct(Cell.extraLinkAllowance)
if (linkInterval==1 and # dividing links next to each other adds one more link
not (len(self.links) < Cell.maxLink or allowExtra and len(self.links) < Cell.maxLink+1) ) :
return None
idx = IRand.getInt(0,len(self.links)-1)
for i in range(len(self.links)) : # check all pairs
c1 = self.links[(i+idx)%len(self.links)].oppositeCell(self)
c2 = self.links[(i+idx+linkInterval)%len(self.links)].oppositeCell(self)
if (len(c1.links) < Cell.maxLink and len(c2.links) < Cell.maxLink or # division adds one link on the end of each dividing link
allowExtra and len(c1.links) < Cell.maxLink+1 and len(c2.links) < Cell.maxLink+1 ) :
return [ i+idx, i+idx+linkInterval ] # index can be larger than self.links.size()
return None
def insertChild(self, child, linksToChild) : # insert child cell and reconnect links
removingFaces = []
for f in self.faces :
for j in range(len(linksToChild)-1) :
if (f.contains(linksToChild[j]) and
f.contains(linksToChild[j+1])) : #a face between replacing links is removed
removingFaces.append(f)
break
for i in range(1, len(linksToChild)-1) :
linksToChild[i].delete() # replacing links are once removed
CellLink(linksToChild[i].oppositeCell(self), child) # then recreated
cell1 = linksToChild[0].oppositeCell(self) # one of two dividing link cell
cell2 = linksToChild[len(linksToChild)-1].oppositeCell(self) # another dividing link cell
CellLink(child, cell1)
CellLink(child, cell2)
CellLink(self, child)
for f in removingFaces :
f.delete() # replace face by deleting and recreating
cells = f.oppositeCell(self)
CellFace(child, cells[0], cells[1])
CellFace(self, cell1, child)
CellFace(self, child, cell2)
class CellLink(IAgent) : # a link to connect 2 cells with spring force
maxForce = 100
def __init__(self, c1, c2) :
IAgent.__init__(self)
self.cell1 = c1
self.cell2 = c2
self.cell1.links.append(self) # register this link to cells{
self.cell2.links.append(self)
self.faces = []
def interact(self, agents) :
# spring force
dif = self.cell1.pos().dif(self.cell2.pos())
force = (dif.len()-(self.cell1.radius+self.cell2.radius))/(self.cell1.radius+self.cell2.radius)*300
if force > CellLink.maxForce : # if putting too much force
force = CellLink.maxForce
elif force < -CellLink.maxForce :
force = -CellLink.maxForce
dif.len(force)
self.cell1.pull(dif)
self.cell2.push(dif)
def contains(self, c) : #check if link contains the cell
if c is self.cell1 or c is self.cell2 :
return True
return False
def delete(self) :
self.cell1.links.remove(self) # unregister from cells
self.cell2.links.remove(self)
self.del() # stop agent
def oppositeFace(self, f) : # find other face on the link
if len(self.faces)!=2 :
return None
if self.faces[0] is f :
return self.faces[1]
return self.faces[0]
def oppositeCell(self, c) : # find other cell on the link
if self.cell1 is c :
return self.cell2
if self.cell2 is c :
return self.cell1
print("Link does not contain the input cell")
return None
def oppositeDir(self, c) : #calculate a vector to the other cell
return self.oppositeCell(c).pos().dif(c.pos())
class CellFace : # a triangle grouping 3 cells and 3 links
def __init__(self, c1, c2, c3) :
self.link1 = self.findLink(c1, c2)
# keep order of cells in right hand screw for consistent normal
if len(self.link1.faces)==1 and self.link1.faces[0].cellOrder(c1,c2) :
self.cell1 = c2
self.cell2 = c1
self.cell3 = c3
else :
self.cell1 = c1
self.cell2 = c2
self.cell3 = c3
self.link1 = self.findLink(self.cell1, self.cell2)
self.link2 = self.findLink(self.cell2, self.cell3)
self.link3 = self.findLink(self.cell3, self.cell1)
self.cell1.faces.append(self) # register this face to cells and links
self.cell2.faces.append(self)
self.cell3.faces.append(self)
self.link1.faces.append(self)
self.link2.faces.append(self)
self.link3.faces.append(self)
self.face = IFace(self.cell1.vertex,self.cell2.vertex,self.cell3.vertex)
mesh.addFace(self.face) # add triangular face to the mesh
def center(self) : # calc center of triangle
return IVec.center(self.cell1.pos(), self.cell2.pos(), self.cell3.pos())
def nml(self) : # normal vector
return self.cell1.pos().nml(self.cell2.pos(), self.cell3.pos()).unit()
def flipNml(self) : # flip normal
tmp = self.cell2
tmpLink = self.link2
self.cell2 = self.cell3
self.link2 = self.link3
self.cell3 = tmp
self.link3 = tmpLink
# True if ordr of c1-c2 follows the order of cell1-cell2-cell3, otherwise False
def cellOrder(self, c1, c2) :
if ( self.cell1 is c1 and self.cell2 is c2 or
self.cell2 is c1 and self.cell3 is c2 or
self.cell3 is c1 and self.cell1 is c2 ) :
return True
return False
def contains(self, link) : # check if the link is contained
return self.link1 is link or self.link2 is link or self.link3 is link
def findLink(self, c1, c2) : # find a link between 2 cells
for l in c1.links :
if l.contains(c2) :
return l
print("link not found")
return None
def oppositeCell(self, c) : # find 2 cells opposite of a cell in a triangle
if self.cell1 is c :
return [ self.cell2, self.cell3 ]
if self.cell2 is c :
return [ self.cell3, self.cell1 ]
if self.cell3 is c :
return [ self.cell1, self.cell2 ]
return None
def oppositeLink(self, c) : # find opposite link of a cell in a triangle
if not self.link1.contains(c) :
return self.link1
if not self.link2.contains(c) :
return self.link2
if not self.link3.contains(c) :
return self.link3
return None
def delete(self) :
self.cell1.faces.remove(self) # unregister self from cells and links
self.cell2.faces.remove(self)
self.cell3.faces.remove(self)
self.link1.faces.remove(self)
self.link2.faces.remove(self)
self.link3.faces.remove(self)
mesh.deleteFace(self.face)
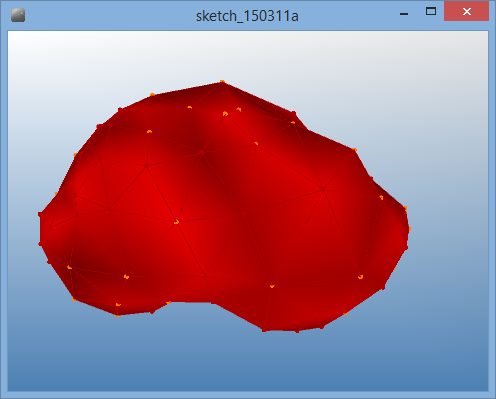
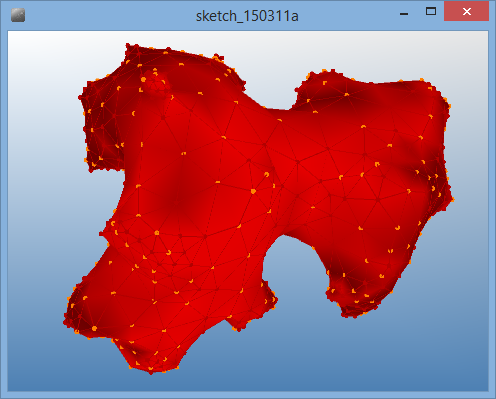
Cascading Activation Control on Division
![]()
![]()
![]()
add_library('igeo')
mesh = None # global variable of mesh geometry
def setup() :
size(480,360,IG.GL)
IConfig.syncDrawAndDynamics=True #not to crash when some geometry is deleted while drawing
mesh = IMesh().clr(0.7,0,0)
cell = Cell(IVec(0,0,0), 10)
cell.active = True
class Cell(IParticle) :
growthDuration = 10000 #duration of growth and division
growthInterval = 10
divisionInterval = 20
maxRadius = 100
growthSpeed=0.1
maxLink = 6 #limit on number of links per cell
extraLinkAllowance = 0 #percentage to accept one more link than maxLink
def __init__(self, pos, rad) :
IParticle.__init__(self, pos, IVec(0,0,0))
self.radius = rad
self.links = [] #store links
self.faces = [] #store faces
self.active = False
self.vertex = IVertex(self.pos())
self.fric(0.2)
def interact(self, agents) :
neighborCenter = IVec(0,0,0)
neighborCount=0
neighborDist = self.radius*4
for a in agents :
if isinstance(a, Cell) :
if a is not self :
# push if closer than two radii
if a.pos().dist(self.pos()) < a.radius+self.radius :
dif = a.pos().dif(self.pos())
dif.len(((a.radius+self.radius)-dif.len())*100+50) # the closer the harder to push
a.push(dif)
# count neighbors and calculate their center
if a.pos().dist(self.pos()) < a.radius+self.radius + neighborDist :
neighborCenter.add(a.pos())
neighborCount+=1
if neighborCount >= 1 : # push from center of neighbors
neighborCenter.div(neighborCount)
dif = self.pos().dif(neighborCenter).len(100) # constant force
self.push(dif)
self.push(self.nml().len(20)) # pressure toward normal
def update(self) :
if IG.time() < Cell.growthDuration :
if self.time() > 0 and self.time()%Cell.divisionInterval==0 :
if self.active : # divide when active flag is on
self.divide()
if self.time()%Cell.growthInterval==0 :
self.grow()
if self.active : # update color by being active
self.clr(1.0,0.5,0)
else :
self.clr(mesh.clr())
self.vertex.pos().set(self.pos()) # update mesh vertex position
self.vertex.nml(self.nml()) # update mesh vertex normal
def grow(self) : # growing cell size
if self.radius < Cell.maxRadius :
self.radius += Cell.growthSpeed
def divide(self) : # cell division
if len(self.links)==0 : # dot state
child = self.createChild(IRand.dir())
CellLink(self, child) # add one link
elif len(self.links)==1 : # line state
# making a triangle loop
child = self.createChild(IRand.dir())
CellLink(child, self.links[0].cell1)
CellLink(child, self.links[0].cell2)
CellFace(child, self.links[0].cell1, self.links[0].cell2) # making a triangle face
elif len(self.links)==2 : # triangle
# making a tetrahedron enclosure
child = self.createChild(IRand.dir())
f = self.faces[0]
center = IVec.center(child.pos(),f.cell1.pos(),f.cell2.pos(),f.cell3.pos())
if f.center().dif(center).dot(f.nml())<0 :
f.flipNml() # adjust normal to be outward
CellLink(f.cell1, child)
CellLink(f.cell2, child)
CellLink(f.cell3, child)
f1 = CellFace(f.cell1, f.cell2, child)
f2 = CellFace(f.cell2, f.cell3, child)
f3 = CellFace(f.cell3, f.cell1, child)
if f1.center().dif(center).dot(f1.nml())<0 :
f1.flipNml()
if f2.center().dif(center).dot(f2.nml())<0 :
f2.flipNml()
if f3.center().dif(center).dot(f3.nml())<0 :
f3.flipNml()
else : # link num > 3
# pick two links and insert two faces between
linkIdx = self.findDividingLinks()
if linkIdx is None : # no valid edge to split. skip division.
self.active = False
return
linksToChild = [] # links to reconnect to child
for i in range(linkIdx[0], linkIdx[1]+1) :
linksToChild.append(self.links[i%len(self.links)])
dir = IVec()
for l in linksToChild : # average of links1 dir
dir.add(l.oppositeDir(self).unit())
dir.projectToPlane(self.nml())
child = self.createChild(dir)
self.insertChild(child, linksToChild)
def nml(self) : # calc vertex normal from face normal
if len(self.faces)==0 :
return IVec(0,0,1)
n = IVec(0,0,0)
for f in self.faces :
n.add(f.nml())
return n.unit()
def createChild(self, dir) :
self.radius *= 0.5 #make both cell size half
dir.len(self.radius)
child = Cell(self.pos().cp(dir), self.radius)
self.pos().sub(dir) # move to the other way
self.active = False #reset activation
child.active = True #activate child always
return child
def sortLinks(self) : # sort links by following connected faces
if len(self.links) <= 3 :
return # no need to sort
sorted = []
currentLink = self.links[0]
currentFace = currentLink.faces[0]
for i in range(len(self.links)) :
sorted.append(currentLink)
currentLink = currentFace.oppositeLink(currentLink.oppositeCell(self))
currentFace = currentLink.oppositeFace(currentFace)
self.links = sorted
def findDividingLinks(self) : # find splittable two links and return the index numbers
linkInterval = 1 # face division only
self.sortLinks() # sort the order of links around cell
allowExtra = IRand.pct(Cell.extraLinkAllowance)
if (linkInterval==1 and # dividing links next to each other adds one more link
not (len(self.links) < Cell.maxLink or allowExtra and len(self.links) < Cell.maxLink+1) ) :
return None
idx = IRand.getInt(0,len(self.links)-1)
for i in range(len(self.links)) : # check all pairs
c1 = self.links[(i+idx)%len(self.links)].oppositeCell(self)
c2 = self.links[(i+idx+linkInterval)%len(self.links)].oppositeCell(self)
if (len(c1.links) < Cell.maxLink and len(c2.links) < Cell.maxLink or # division adds one link on the end of each dividing link
allowExtra and len(c1.links) < Cell.maxLink+1 and len(c2.links) < Cell.maxLink+1 ) :
return [ i+idx, i+idx+linkInterval ] # index can be larger than self.links.size()
return None
def insertChild(self, child, linksToChild) : # insert child cell and reconnect links
removingFaces = []
for f in self.faces :
for j in range(len(linksToChild)-1) :
if (f.contains(linksToChild[j]) and
f.contains(linksToChild[j+1])) : #a face between replacing links is removed
removingFaces.append(f)
break
for i in range(1, len(linksToChild)-1) :
linksToChild[i].delete() # replacing links are once removed
CellLink(linksToChild[i].oppositeCell(self), child) # then recreated
cell1 = linksToChild[0].oppositeCell(self) # one of two dividing link cell
cell2 = linksToChild[len(linksToChild)-1].oppositeCell(self) # another dividing link cell
CellLink(child, cell1)
CellLink(child, cell2)
CellLink(self, child)
for f in removingFaces :
f.delete() # replace face by deleting and recreating
cells = f.oppositeCell(self)
CellFace(child, cells[0], cells[1])
CellFace(self, cell1, child)
CellFace(self, child, cell2)
class CellLink(IAgent) : # a link to connect 2 cells with spring force
maxForce = 100
def __init__(self, c1, c2) :
IAgent.__init__(self)
self.cell1 = c1
self.cell2 = c2
self.cell1.links.append(self) # register this link to cells{
self.cell2.links.append(self)
self.faces = []
def interact(self, agents) :
# spring force
dif = self.cell1.pos().dif(self.cell2.pos())
force = (dif.len()-(self.cell1.radius+self.cell2.radius))/(self.cell1.radius+self.cell2.radius)*300
if force > CellLink.maxForce : # if putting too much force
force = CellLink.maxForce
elif force < -CellLink.maxForce :
force = -CellLink.maxForce
dif.len(force)
self.cell1.pull(dif)
self.cell2.push(dif)
def contains(self, c) : #check if link contains the cell
if c is self.cell1 or c is self.cell2 :
return True
return False
def delete(self) :
self.cell1.links.remove(self) # unregister from cells
self.cell2.links.remove(self)
self.del() # stop agent
def oppositeFace(self, f) : # find other face on the link
if len(self.faces)!=2 :
return None
if self.faces[0] is f :
return self.faces[1]
return self.faces[0]
def oppositeCell(self, c) : # find other cell on the link
if self.cell1 is c :
return self.cell2
if self.cell2 is c :
return self.cell1
print("Link does not contain the input cell")
return None
def oppositeDir(self, c) : #calculate a vector to the other cell
return self.oppositeCell(c).pos().dif(c.pos())
class CellFace : # a triangle grouping 3 cells and 3 links
def __init__(self, c1, c2, c3) :
self.link1 = self.findLink(c1, c2)
# keep order of cells in right hand screw for consistent normal
if len(self.link1.faces)==1 and self.link1.faces[0].cellOrder(c1,c2) :
self.cell1 = c2
self.cell2 = c1
self.cell3 = c3
else :
self.cell1 = c1
self.cell2 = c2
self.cell3 = c3
self.link1 = self.findLink(self.cell1, self.cell2)
self.link2 = self.findLink(self.cell2, self.cell3)
self.link3 = self.findLink(self.cell3, self.cell1)
self.cell1.faces.append(self) # register this face to cells and links
self.cell2.faces.append(self)
self.cell3.faces.append(self)
self.link1.faces.append(self)
self.link2.faces.append(self)
self.link3.faces.append(self)
self.face = IFace(self.cell1.vertex,self.cell2.vertex,self.cell3.vertex)
mesh.addFace(self.face) # add triangular face to the mesh
def center(self) : # calc center of triangle
return IVec.center(self.cell1.pos(), self.cell2.pos(), self.cell3.pos())
def nml(self) : # normal vector
return self.cell1.pos().nml(self.cell2.pos(), self.cell3.pos()).unit()
def flipNml(self) : # flip normal
tmp = self.cell2
tmpLink = self.link2
self.cell2 = self.cell3
self.link2 = self.link3
self.cell3 = tmp
self.link3 = tmpLink
# True if ordr of c1-c2 follows the order of cell1-cell2-cell3, otherwise False
def cellOrder(self, c1, c2) :
if ( self.cell1 is c1 and self.cell2 is c2 or
self.cell2 is c1 and self.cell3 is c2 or
self.cell3 is c1 and self.cell1 is c2 ) :
return True
return False
def contains(self, link) : # check if the link is contained
return self.link1 is link or self.link2 is link or self.link3 is link
def findLink(self, c1, c2) : # find a link between 2 cells
for l in c1.links :
if l.contains(c2) :
return l
print("link not found")
return None
def oppositeCell(self, c) : # find 2 cells opposite of a cell in a triangle
if self.cell1 is c :
return [ self.cell2, self.cell3 ]
if self.cell2 is c :
return [ self.cell3, self.cell1 ]
if self.cell3 is c :
return [ self.cell1, self.cell2 ]
return None
def oppositeLink(self, c) : # find opposite link of a cell in a triangle
if not self.link1.contains(c) :
return self.link1
if not self.link2.contains(c) :
return self.link2
if not self.link3.contains(c) :
return self.link3
return None
def delete(self) :
self.cell1.faces.remove(self) # unregister self from cells and links
self.cell2.faces.remove(self)
self.cell3.faces.remove(self)
self.link1.faces.remove(self)
self.link2.faces.remove(self)
self.link3.faces.remove(self)
mesh.deleteFace(self.face)

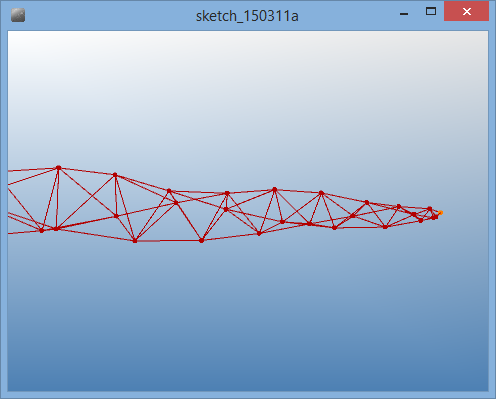
Branching Activation Control on Division
![]()
![]()
![]()
add_library('igeo')
mesh = None # global variable of mesh geometry
def setup() :
size(480,360,IG.GL)
IConfig.syncDrawAndDynamics=True #not to crash when some geometry is deleted while drawing
mesh = IMesh().clr(0.7,0,0)
cell = Cell(IVec(0,0,0), 10)
cell.active = True
class Cell(IParticle) :
growthDuration = 2000 #duration of growth and division
growthInterval = 10
divisionInterval = 20
maxRadius = 100
growthSpeed=0.1
maxLink = 8 #limit on number of links per cell
extraLinkAllowance = 0 #percentage to accept one more link than maxLink
def __init__(self, pos, rad) :
IParticle.__init__(self, pos, IVec(0,0,0))
self.radius = rad
self.links = [] #store links
self.faces = [] #store faces
self.active = False
self.vertex = IVertex(self.pos())
self.fric(0.2)
def interact(self, agents) :
neighborCenter = IVec(0,0,0)
neighborCount=0
neighborDist = self.radius*4
for a in agents :
if isinstance(a, Cell) :
if a is not self :
# push if closer than two radii
if a.pos().dist(self.pos()) < a.radius+self.radius :
dif = a.pos().dif(self.pos())
dif.len(((a.radius+self.radius)-dif.len())*100+50) # the closer the harder to push
a.push(dif)
# count neighbors and calculate their center
if a.pos().dist(self.pos()) < a.radius+self.radius + neighborDist :
neighborCenter.add(a.pos())
neighborCount+=1
if neighborCount >= 1 : # push from center of neighbors
neighborCenter.div(neighborCount)
dif = self.pos().dif(neighborCenter).len(100) # constant force
self.push(dif)
self.push(self.nml().len(20)) # pressure toward normal
def update(self) :
if IG.time() < Cell.growthDuration :
if self.time() > 0 and self.time()%Cell.divisionInterval==0 :
if self.active : # divide when active flag is on
self.divide()
if self.time()%Cell.growthInterval==0 :
self.grow()
if self.active : # update color by being active
self.clr(1.0,0.5,0)
else :
self.clr(mesh.clr())
self.vertex.pos().set(self.pos()) # update mesh vertex position
self.vertex.nml(self.nml()) # update mesh vertex normal
def grow(self) : # growing cell size
if self.radius < Cell.maxRadius :
self.radius += Cell.growthSpeed
def divide(self) : # cell division
if len(self.links)==0 : # dot state
child = self.createChild(IRand.dir())
CellLink(self, child) # add one link
elif len(self.links)==1 : # line state
# making a triangle loop
child = self.createChild(IRand.dir())
CellLink(child, self.links[0].cell1)
CellLink(child, self.links[0].cell2)
CellFace(child, self.links[0].cell1, self.links[0].cell2) # making a triangle face
elif len(self.links)==2 : # triangle
# making a tetrahedron enclosure
child = self.createChild(IRand.dir())
f = self.faces[0]
center = IVec.center(child.pos(),f.cell1.pos(),f.cell2.pos(),f.cell3.pos())
if f.center().dif(center).dot(f.nml())<0 :
f.flipNml() # adjust normal to be outward
CellLink(f.cell1, child)
CellLink(f.cell2, child)
CellLink(f.cell3, child)
f1 = CellFace(f.cell1, f.cell2, child)
f2 = CellFace(f.cell2, f.cell3, child)
f3 = CellFace(f.cell3, f.cell1, child)
if f1.center().dif(center).dot(f1.nml())<0 :
f1.flipNml()
if f2.center().dif(center).dot(f2.nml())<0 :
f2.flipNml()
if f3.center().dif(center).dot(f3.nml())<0 :
f3.flipNml()
else : # link num > 3
# pick two links and insert two faces between
linkIdx = self.findDividingLinks()
if linkIdx is None : # no valid edge to split. skip division.
self.active = False
return
linksToChild = [] # links to reconnect to child
for i in range(linkIdx[0], linkIdx[1]+1) :
linksToChild.append(self.links[i%len(self.links)])
dir = IVec()
for l in linksToChild : # average of links1 dir
dir.add(l.oppositeDir(self).unit())
dir.projectToPlane(self.nml())
child = self.createChild(dir)
self.insertChild(child, linksToChild)
def nml(self) : # calc vertex normal from face normal
if len(self.faces)==0 :
return IVec(0,0,1)
n = IVec(0,0,0)
for f in self.faces :
n.add(f.nml())
return n.unit()
def createChild(self, dir) :
self.radius *= 0.5 #make both cell size half
dir.len(self.radius)
child = Cell(self.pos().cp(dir), self.radius)
self.pos().sub(dir) # move to the other way
if IRand.pct(90) :
self.active = False #10% stay active
child.active = True #activate child always
return child
def sortLinks(self) : # sort links by following connected faces
if len(self.links) <= 3 :
return # no need to sort
sorted = []
currentLink = self.links[0]
currentFace = currentLink.faces[0]
for i in range(len(self.links)) :
sorted.append(currentLink)
currentLink = currentFace.oppositeLink(currentLink.oppositeCell(self))
currentFace = currentLink.oppositeFace(currentFace)
self.links = sorted
def findDividingLinks(self) : # find splittable two links and return the index numbers
linkInterval = 1 # interaval between two links
self.sortLinks() # sort the order of links around cell
allowExtra = IRand.pct(Cell.extraLinkAllowance)
if (linkInterval==1 and # dividing links next to each other adds one more link
not (len(self.links) < Cell.maxLink or allowExtra and len(self.links) < Cell.maxLink+1) ) :
return None
idx = IRand.getInt(0,len(self.links)-1)
for i in range(len(self.links)) : # check all pairs
c1 = self.links[(i+idx)%len(self.links)].oppositeCell(self)
c2 = self.links[(i+idx+linkInterval)%len(self.links)].oppositeCell(self)
if (len(c1.links) < Cell.maxLink and len(c2.links) < Cell.maxLink or # division adds one link on the end of each dividing link
allowExtra and len(c1.links) < Cell.maxLink+1 and len(c2.links) < Cell.maxLink+1 ) :
return [ i+idx, i+idx+linkInterval ] # index can be larger than self.links.size()
return None
def insertChild(self, child, linksToChild) : # insert child cell and reconnect links
removingFaces = []
for f in self.faces :
for j in range(len(linksToChild)-1) :
if (f.contains(linksToChild[j]) and
f.contains(linksToChild[j+1])) : #a face between replacing links is removed
removingFaces.append(f)
break
for i in range(1, len(linksToChild)-1) :
linksToChild[i].delete() # replacing links are once removed
CellLink(linksToChild[i].oppositeCell(self), child) # then recreated
cell1 = linksToChild[0].oppositeCell(self) # one of two dividing link cell
cell2 = linksToChild[len(linksToChild)-1].oppositeCell(self) # another dividing link cell
CellLink(child, cell1)
CellLink(child, cell2)
CellLink(self, child)
for f in removingFaces :
f.delete() # replace face by deleting and recreating
cells = f.oppositeCell(self)
CellFace(child, cells[0], cells[1])
CellFace(self, cell1, child)
CellFace(self, child, cell2)
class CellLink(IAgent) : # a link to connect 2 cells with spring force
maxForce = 100
def __init__(self, c1, c2) :
IAgent.__init__(self)
self.cell1 = c1
self.cell2 = c2
self.cell1.links.append(self) # register this link to cells{
self.cell2.links.append(self)
self.faces = []
def interact(self, agents) :
# spring force
dif = self.cell1.pos().dif(self.cell2.pos())
force = (dif.len()-(self.cell1.radius+self.cell2.radius))/(self.cell1.radius+self.cell2.radius)*300
if force > CellLink.maxForce : # if putting too much force
force = CellLink.maxForce
elif force < -CellLink.maxForce :
force = -CellLink.maxForce
dif.len(force)
self.cell1.pull(dif)
self.cell2.push(dif)
def contains(self, c) : #check if link contains the cell
if c is self.cell1 or c is self.cell2 :
return True
return False
def delete(self) :
self.cell1.links.remove(self) # unregister from cells
self.cell2.links.remove(self)
self.del() # stop agent
def oppositeFace(self, f) : # find other face on the link
if len(self.faces)!=2 :
return None
if self.faces[0] is f :
return self.faces[1]
return self.faces[0]
def oppositeCell(self, c) : # find other cell on the link
if self.cell1 is c :
return self.cell2
if self.cell2 is c :
return self.cell1
print("Link does not contain the input cell")
return None
def oppositeDir(self, c) : #calculate a vector to the other cell
return self.oppositeCell(c).pos().dif(c.pos())
class CellFace : # a triangle grouping 3 cells and 3 links
def __init__(self, c1, c2, c3) :
self.link1 = self.findLink(c1, c2)
# keep order of cells in right hand screw for consistent normal
if len(self.link1.faces)==1 and self.link1.faces[0].cellOrder(c1,c2) :
self.cell1 = c2
self.cell2 = c1
self.cell3 = c3
else :
self.cell1 = c1
self.cell2 = c2
self.cell3 = c3
self.link1 = self.findLink(self.cell1, self.cell2)
self.link2 = self.findLink(self.cell2, self.cell3)
self.link3 = self.findLink(self.cell3, self.cell1)
self.cell1.faces.append(self) # register this face to cells and links
self.cell2.faces.append(self)
self.cell3.faces.append(self)
self.link1.faces.append(self)
self.link2.faces.append(self)
self.link3.faces.append(self)
self.face = IFace(self.cell1.vertex,self.cell2.vertex,self.cell3.vertex)
mesh.addFace(self.face) # add triangular face to the mesh
def center(self) : # calc center of triangle
return IVec.center(self.cell1.pos(), self.cell2.pos(), self.cell3.pos())
def nml(self) : # normal vector
return self.cell1.pos().nml(self.cell2.pos(), self.cell3.pos()).unit()
def flipNml(self) : # flip normal
tmp = self.cell2
tmpLink = self.link2
self.cell2 = self.cell3
self.link2 = self.link3
self.cell3 = tmp
self.link3 = tmpLink
# True if ordr of c1-c2 follows the order of cell1-cell2-cell3, otherwise False
def cellOrder(self, c1, c2) :
if ( self.cell1 is c1 and self.cell2 is c2 or
self.cell2 is c1 and self.cell3 is c2 or
self.cell3 is c1 and self.cell1 is c2 ) :
return True
return False
def contains(self, link) : # check if the link is contained
return self.link1 is link or self.link2 is link or self.link3 is link
def findLink(self, c1, c2) : # find a link between 2 cells
for l in c1.links :
if l.contains(c2) :
return l
print("link not found")
return None
def oppositeCell(self, c) : # find 2 cells opposite of a cell in a triangle
if self.cell1 is c :
return [ self.cell2, self.cell3 ]
if self.cell2 is c :
return [ self.cell3, self.cell1 ]
if self.cell3 is c :
return [ self.cell1, self.cell2 ]
return None
def oppositeLink(self, c) : # find opposite link of a cell in a triangle
if not self.link1.contains(c) :
return self.link1
if not self.link2.contains(c) :
return self.link2
if not self.link3.contains(c) :
return self.link3
return None
def delete(self) :
self.cell1.faces.remove(self) # unregister self from cells and links
self.cell2.faces.remove(self)
self.cell3.faces.remove(self)
self.link1.faces.remove(self)
self.link2.faces.remove(self)
self.link3.faces.remove(self)
mesh.deleteFace(self.face)
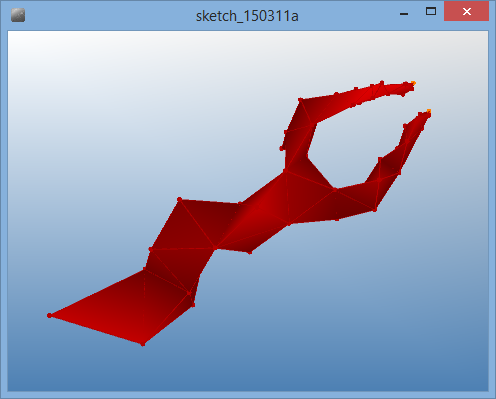
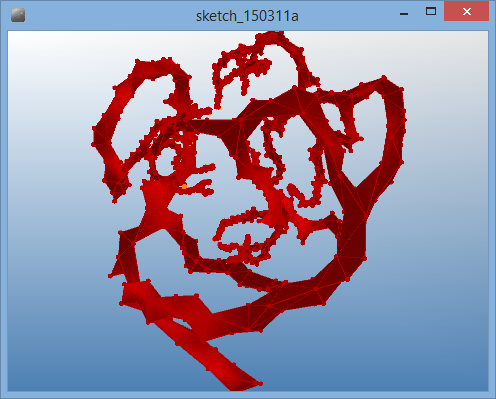
Parent/Child Activation Behavior Control
![]()
![]()
![]()
add_library('igeo')
mesh = None # global variable of mesh geometry
def setup() :
size(480,360,IG.GL)
IConfig.syncDrawAndDynamics=True #not to crash when some geometry is deleted while drawing
mesh = IMesh().clr(0.7,0,0)
cell = Cell(IVec(0,0,0), 10)
cell.stayActive = True
cell.activateChild = True
cell.active = True
class Cell(IParticle) :
growthDuration = 1800 #duration of growth and division
growthInterval = 10
divisionInterval = 20
maxRadius = 100
growthSpeed=0.1
maxLink = 6 #limit on number of links per cell
extraLinkAllowance = 10 #percentage to accept one more link than maxLink
def __init__(self, pos, rad) :
IParticle.__init__(self, pos, IVec(0,0,0))
self.radius = rad
self.links = [] #store links
self.faces = [] #store faces
self.active = False
self.stayActive = False #activation control variables
self.activateChild = False
self.vertex = IVertex(self.pos())
self.fric(0.2)
def interact(self, agents) :
neighborCenter = IVec(0,0,0)
neighborCount=0
neighborDist = self.radius*4
for a in agents :
if isinstance(a, Cell) :
if a is not self :
# push if closer than two radii
if a.pos().dist(self.pos()) < a.radius+self.radius :
dif = a.pos().dif(self.pos())
dif.len(((a.radius+self.radius)-dif.len())*100+50) # the closer the harder to push
a.push(dif)
# count neighbors and calculate their center
if a.pos().dist(self.pos()) < a.radius+self.radius + neighborDist :
neighborCenter.add(a.pos())
neighborCount+=1
if neighborCount >= 1 : # push from center of neighbors
neighborCenter.div(neighborCount)
dif = self.pos().dif(neighborCenter).len(50) # constant force
self.push(dif)
self.push(self.nml().len(100)) # pressure toward normal
def update(self) :
if IG.time() < Cell.growthDuration :
if self.time() > 0 and self.time()%Cell.divisionInterval==0 :
if self.active : # divide when active flag is on
self.divide()
if self.time()%Cell.growthInterval==0 :
self.grow()
if self.active : # update color by being active
self.clr(1.0,0.5,0)
else :
self.clr(mesh.clr())
self.vertex.pos().set(self.pos()) # update mesh vertex position
self.vertex.nml(self.nml()) # update mesh vertex normal
def grow(self) : # growing cell size
if self.radius < Cell.maxRadius :
self.radius += Cell.growthSpeed
def divide(self) : # cell division
if len(self.links)==0 : # dot state
child = self.createChild(IRand.dir())
CellLink(self, child) # add one link
elif len(self.links)==1 : # line state
# making a triangle loop
child = self.createChild(IRand.dir())
CellLink(child, self.links[0].cell1)
CellLink(child, self.links[0].cell2)
CellFace(child, self.links[0].cell1, self.links[0].cell2) # making a triangle face
elif len(self.links)==2 : # triangle
# making a tetrahedron enclosure
child = self.createChild(IRand.dir())
f = self.faces[0]
center = IVec.center(child.pos(),f.cell1.pos(),f.cell2.pos(),f.cell3.pos())
if f.center().dif(center).dot(f.nml())<0 :
f.flipNml() # adjust normal to be outward
CellLink(f.cell1, child)
CellLink(f.cell2, child)
CellLink(f.cell3, child)
f1 = CellFace(f.cell1, f.cell2, child)
f2 = CellFace(f.cell2, f.cell3, child)
f3 = CellFace(f.cell3, f.cell1, child)
if f1.center().dif(center).dot(f1.nml())<0 :
f1.flipNml()
if f2.center().dif(center).dot(f2.nml())<0 :
f2.flipNml()
if f3.center().dif(center).dot(f3.nml())<0 :
f3.flipNml()
else : # link num > 3
# pick two links and insert two faces between
linkIdx = self.findDividingLinks()
if linkIdx is None : # no valid edge to split. skip division.
self.active = False
return
linksToChild = [] # links to reconnect to child
for i in range(linkIdx[0], linkIdx[1]+1) :
linksToChild.append(self.links[i%len(self.links)])
dir = IVec()
for l in linksToChild : # average of links1 dir
dir.add(l.oppositeDir(self).unit())
dir.projectToPlane(self.nml())
child = self.createChild(dir)
self.insertChild(child, linksToChild)
def nml(self) : # calc vertex normal from face normal
if len(self.faces)==0 :
return IVec(0,0,1)
n = IVec(0,0,0)
for f in self.faces :
n.add(f.nml())
return n.unit()
def createChild(self, dir) :
self.radius *= 0.5 #make both cell size half
dir.len(self.radius)
child = Cell(self.pos().cp(dir), self.radius)
self.pos().sub(dir) # move to the other way
if self.stayActive : #activation control
self.active = True
else :
self.active = False
if self.activateChild :
child.active = True
else :
child.active = False
child.stayActive = self.stayActive #activation behavior parameters are passed to child
child.activateChild = self.activateChild
return child
def sortLinks(self) : # sort links by following connected faces
if len(self.links) <= 3 :
return # no need to sort
sorted = []
currentLink = self.links[0]
currentFace = currentLink.faces[0]
for i in range(len(self.links)) :
sorted.append(currentLink)
currentLink = currentFace.oppositeLink(currentLink.oppositeCell(self))
currentFace = currentLink.oppositeFace(currentFace)
self.links = sorted
def findDividingLinks(self) : # find splittable two links and return the index numbers
linkInterval = len(self.links)//2 # interaval between two links
self.sortLinks() # sort the order of links around cell
allowExtra = IRand.pct(Cell.extraLinkAllowance)
if (linkInterval==1 and # dividing links next to each other adds one more link
not (len(self.links) < Cell.maxLink or allowExtra and len(self.links) < Cell.maxLink+1) ) :
return None
idx = IRand.getInt(0,len(self.links)-1)
for i in range(len(self.links)) : # check all pairs
c1 = self.links[(i+idx)%len(self.links)].oppositeCell(self)
c2 = self.links[(i+idx+linkInterval)%len(self.links)].oppositeCell(self)
if (len(c1.links) < Cell.maxLink and len(c2.links) < Cell.maxLink or # division adds one link on the end of each dividing link
allowExtra and len(c1.links) < Cell.maxLink+1 and len(c2.links) < Cell.maxLink+1 ) :
return [ i+idx, i+idx+linkInterval ] # index can be larger than self.links.size()
return None
def insertChild(self, child, linksToChild) : # insert child cell and reconnect links
removingFaces = []
for f in self.faces :
for j in range(len(linksToChild)-1) :
if (f.contains(linksToChild[j]) and
f.contains(linksToChild[j+1])) : #a face between replacing links is removed
removingFaces.append(f)
break
for i in range(1, len(linksToChild)-1) :
linksToChild[i].delete() # replacing links are once removed
CellLink(linksToChild[i].oppositeCell(self), child) # then recreated
cell1 = linksToChild[0].oppositeCell(self) # one of two dividing link cell
cell2 = linksToChild[len(linksToChild)-1].oppositeCell(self) # another dividing link cell
CellLink(child, cell1)
CellLink(child, cell2)
CellLink(self, child)
for f in removingFaces :
f.delete() # replace face by deleting and recreating
cells = f.oppositeCell(self)
CellFace(child, cells[0], cells[1])
CellFace(self, cell1, child)
CellFace(self, child, cell2)
class CellLink(IAgent) : # a link to connect 2 cells with spring force
maxForce = 100
def __init__(self, c1, c2) :
IAgent.__init__(self)
self.cell1 = c1
self.cell2 = c2
self.cell1.links.append(self) # register this link to cells{
self.cell2.links.append(self)
self.faces = []
def interact(self, agents) :
# spring force
dif = self.cell1.pos().dif(self.cell2.pos())
force = (dif.len()-(self.cell1.radius+self.cell2.radius))/(self.cell1.radius+self.cell2.radius)*300
if force > CellLink.maxForce : # if putting too much force
force = CellLink.maxForce
elif force < -CellLink.maxForce :
force = -CellLink.maxForce
dif.len(force)
self.cell1.pull(dif)
self.cell2.push(dif)
def contains(self, c) : #check if link contains the cell
if c is self.cell1 or c is self.cell2 :
return True
return False
def delete(self) :
self.cell1.links.remove(self) # unregister from cells
self.cell2.links.remove(self)
self.del() # stop agent
def oppositeFace(self, f) : # find other face on the link
if len(self.faces)!=2 :
return None
if self.faces[0] is f :
return self.faces[1]
return self.faces[0]
def oppositeCell(self, c) : # find other cell on the link
if self.cell1 is c :
return self.cell2
if self.cell2 is c :
return self.cell1
print("Link does not contain the input cell")
return None
def oppositeDir(self, c) : #calculate a vector to the other cell
return self.oppositeCell(c).pos().dif(c.pos())
class CellFace : # a triangle grouping 3 cells and 3 links
def __init__(self, c1, c2, c3) :
self.link1 = self.findLink(c1, c2)
# keep order of cells in right hand screw for consistent normal
if len(self.link1.faces)==1 and self.link1.faces[0].cellOrder(c1,c2) :
self.cell1 = c2
self.cell2 = c1
self.cell3 = c3
else :
self.cell1 = c1
self.cell2 = c2
self.cell3 = c3
self.link1 = self.findLink(self.cell1, self.cell2)
self.link2 = self.findLink(self.cell2, self.cell3)
self.link3 = self.findLink(self.cell3, self.cell1)
self.cell1.faces.append(self) # register this face to cells and links
self.cell2.faces.append(self)
self.cell3.faces.append(self)
self.link1.faces.append(self)
self.link2.faces.append(self)
self.link3.faces.append(self)
self.face = IFace(self.cell1.vertex,self.cell2.vertex,self.cell3.vertex)
mesh.addFace(self.face) # add triangular face to the mesh
def center(self) : # calc center of triangle
return IVec.center(self.cell1.pos(), self.cell2.pos(), self.cell3.pos())
def nml(self) : # normal vector
return self.cell1.pos().nml(self.cell2.pos(), self.cell3.pos()).unit()
def flipNml(self) : # flip normal
tmp = self.cell2
tmpLink = self.link2
self.cell2 = self.cell3
self.link2 = self.link3
self.cell3 = tmp
self.link3 = tmpLink
# True if ordr of c1-c2 follows the order of cell1-cell2-cell3, otherwise False
def cellOrder(self, c1, c2) :
if ( self.cell1 is c1 and self.cell2 is c2 or
self.cell2 is c1 and self.cell3 is c2 or
self.cell3 is c1 and self.cell1 is c2 ) :
return True
return False
def contains(self, link) : # check if the link is contained
return self.link1 is link or self.link2 is link or self.link3 is link
def findLink(self, c1, c2) : # find a link between 2 cells
for l in c1.links :
if l.contains(c2) :
return l
print("link not found")
return None
def oppositeCell(self, c) : # find 2 cells opposite of a cell in a triangle
if self.cell1 is c :
return [ self.cell2, self.cell3 ]
if self.cell2 is c :
return [ self.cell3, self.cell1 ]
if self.cell3 is c :
return [ self.cell1, self.cell2 ]
return None
def oppositeLink(self, c) : # find opposite link of a cell in a triangle
if not self.link1.contains(c) :
return self.link1
if not self.link2.contains(c) :
return self.link2
if not self.link3.contains(c) :
return self.link3
return None
def delete(self) :
self.cell1.faces.remove(self) # unregister self from cells and links
self.cell2.faces.remove(self)
self.cell3.faces.remove(self)
self.link1.faces.remove(self)
self.link2.faces.remove(self)
self.link3.faces.remove(self)
mesh.deleteFace(self.face)
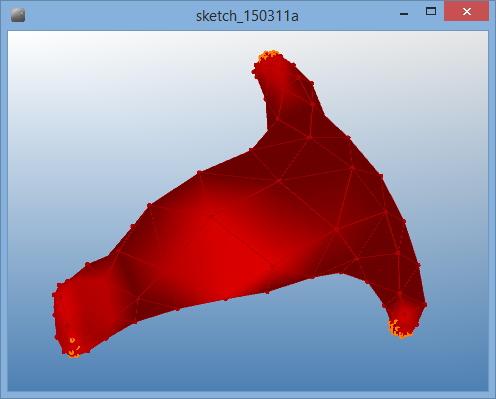
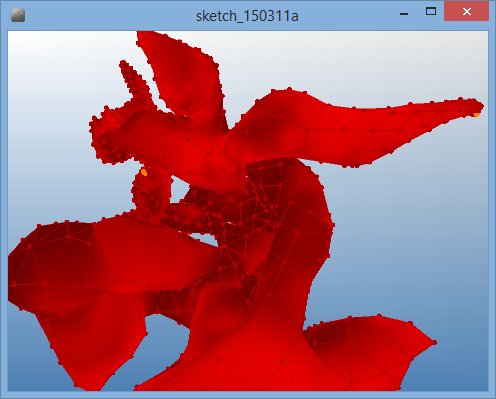
Cell Division and Growth from Imported MeshThe sample mesh file used in the example is below.
![]()
![]()
![]()
Warning: include(codepy/igeo_tutorial56_13/igeo_tutorial56_13.html): failed to open stream: No such file or directory in /home/mj7789dybiu5/public_html/igeo/tutorial/tutorial.php on line 66
Warning: include(): Failed opening 'codepy/igeo_tutorial56_13/igeo_tutorial56_13.html' for inclusion (include_path='.:/opt/alt/php56/usr/share/pear:/opt/alt/php56/usr/share/php') in /home/mj7789dybiu5/public_html/igeo/tutorial/tutorial.php on line 66

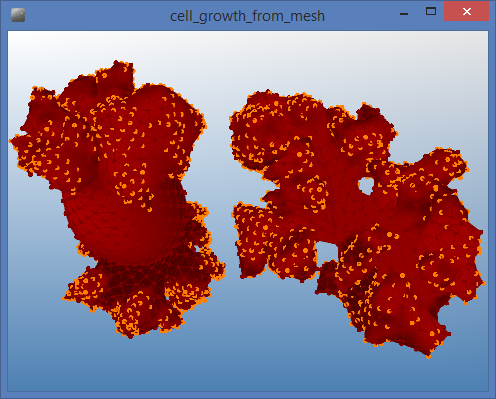
HOME
FOR PROCESSING
DOWNLOAD
DOCUMENTS
TUTORIALS (Java /
Python)
GALLERY
SOURCE CODE(GitHub)
PRIVACY POLICY
ABOUT/CONTACT
